


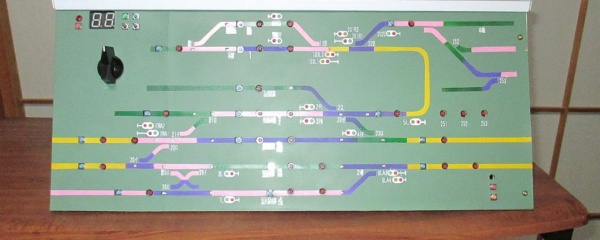
外見が出来上がってきてすっかり満足し、その先に一向に進めなかったNゲージのレイアウト用制御盤。少し作業を進めて。
ステッピングモーターのポイントマシン、試作品を最終形に (その6)
ステッピングモーターを使ったNゲージ用のスローアクションのポイントマシン。
試作品よりちょっぴり省スペースにしたものを作ってみた
が、停止位置の検出にマイクロスイッチを使ったので、調整が割とシビアになり、メンテナンス性は悪そう。
やっぱ、元の案でいこう。
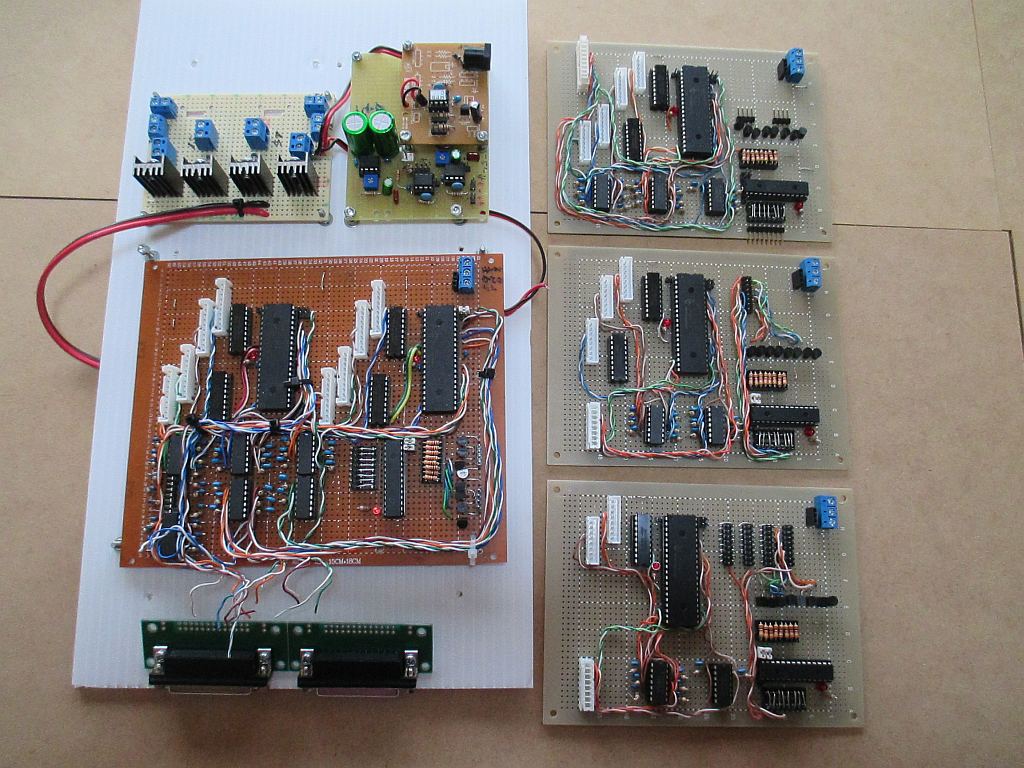
(写真上) レイアウトの台枠は3個。
メインの台枠にはレイアウトの左右にポイントが集中し、左側は8個のポイントがあるので、ここに基盤を一つ。
右側には4個のポイントがあるので、ここに基盤を一つ。
メイン台枠から延長する形の台枠が2個あり、それぞれポイントが3個と2個あるので、基盤も一つずつ。
合計4個の基盤にして作成した。
ポイントマシンの転換の制御はRaspberryPIから関連するマイコンに指示を出すほか、各台枠に取り付けた補助の制御盤からでも押しボタンスイッチで転換できる。

(写真上) ポイントマシンの台座は6mm厚のMDF材。
手持ちのステッピングモーターの大きさが2種類あるのと、ポイントを取り付ける場所によってテコを振る方向が変わるので合計4種のベースが必要になる。
加工はモデラMDX-20で。
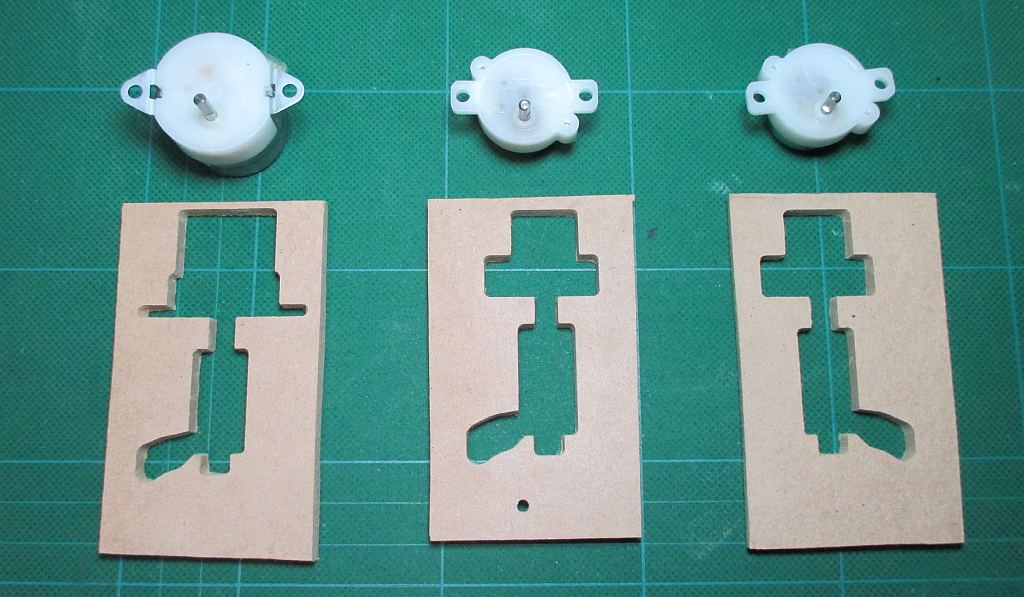
(写真上) が・・でかいモーターはテコを振る方向を1つにまとめられそうだったので、ベースは3種類とした。
ひとまず、3個を作成。
モーターの形状をみてお分かりかと思うが、軸はセンターでなかったり、へんなでっぱりがあったりするので、テコを右に振る場合と左に振る場合で単純にベースを裏返せばよいというものではかなった。
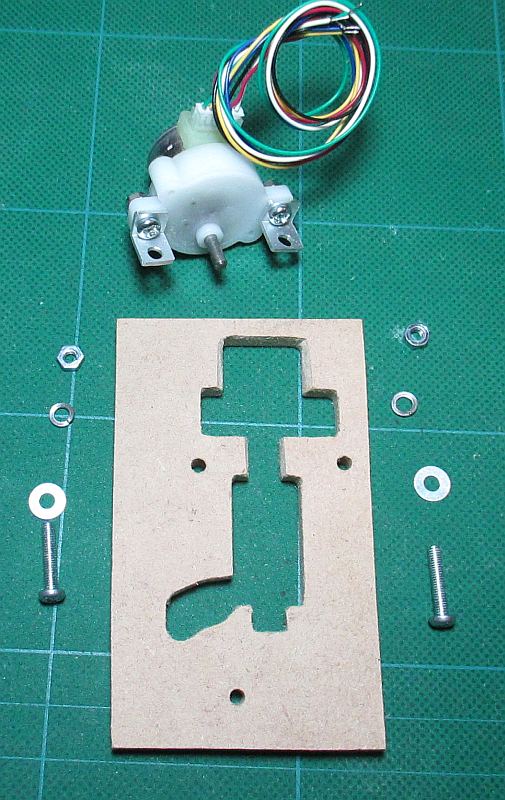
(写真上) モーターはアルミのL型のアングルを小さく切ってネジ穴をあけたもので取り付ける。
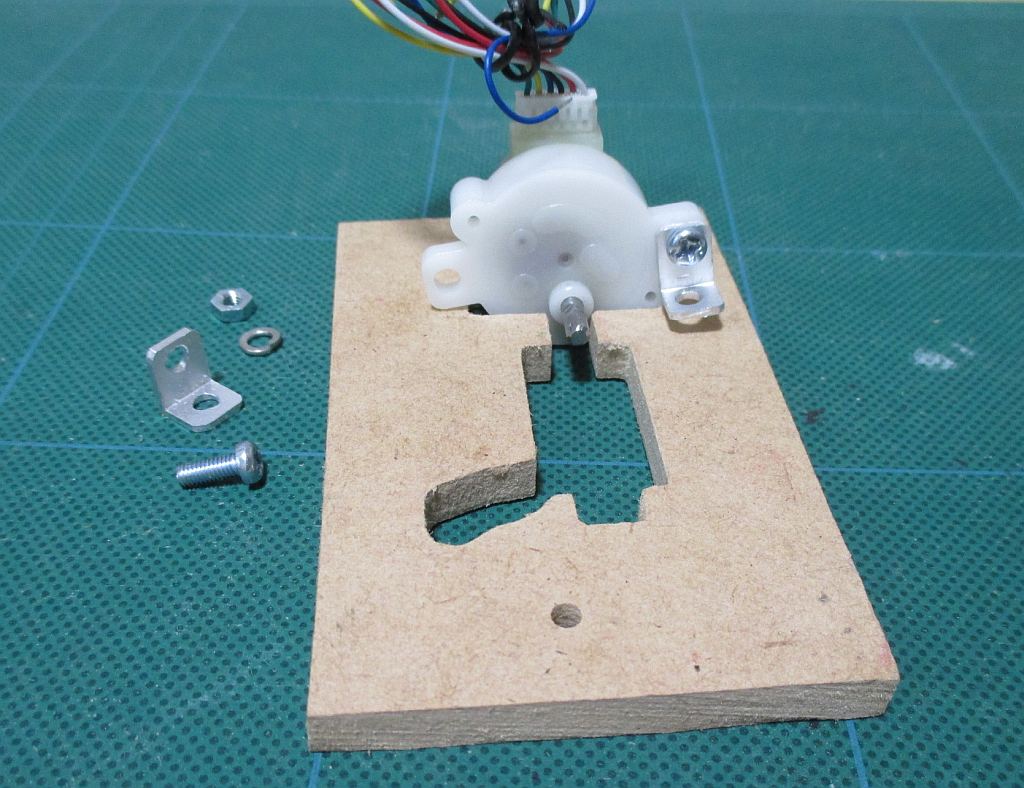
(写真上) 取り付け中。
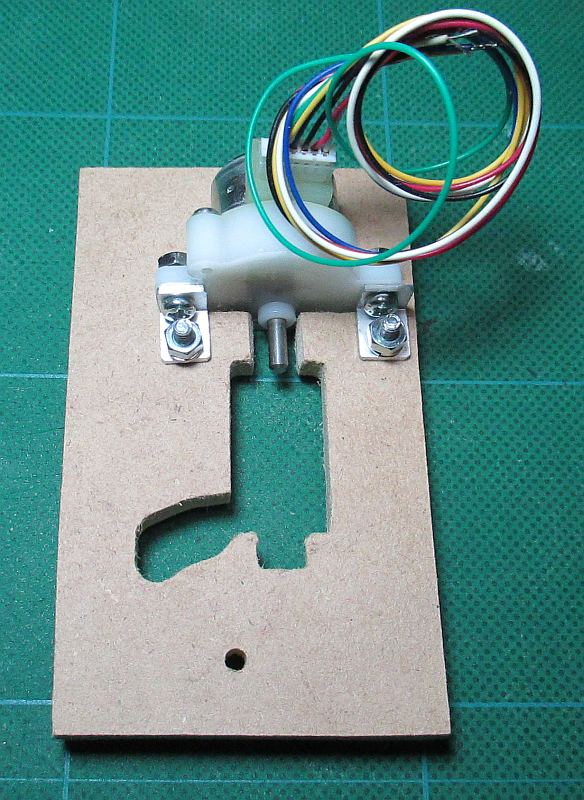
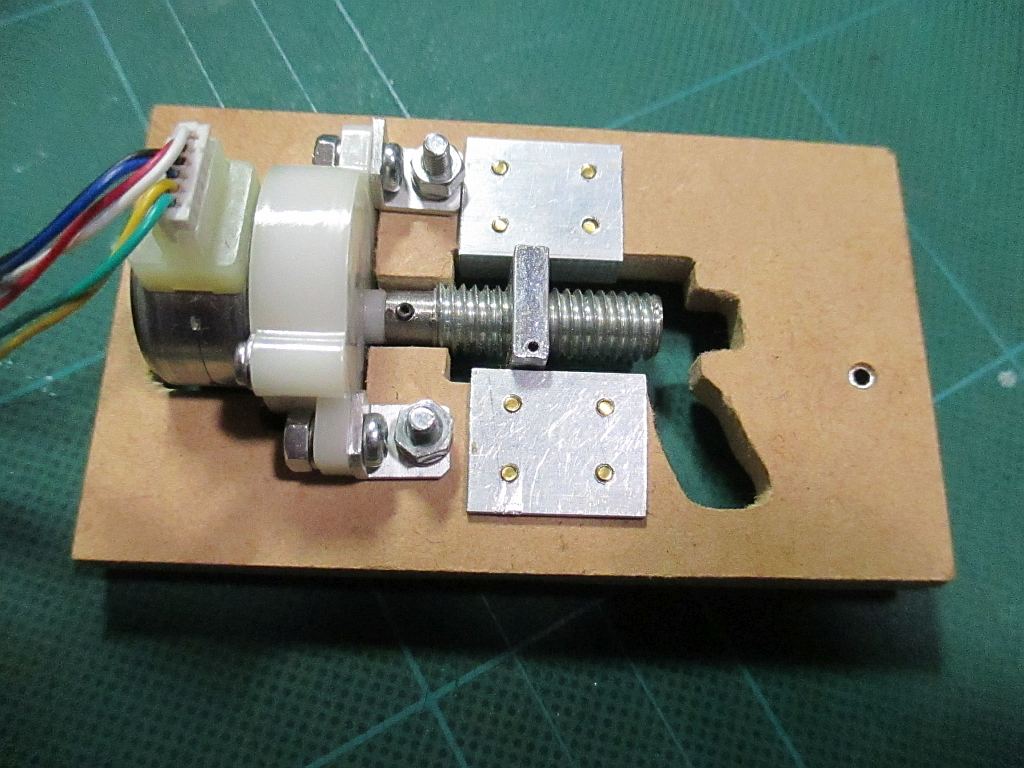
(写真上) モーター取り付け完了。
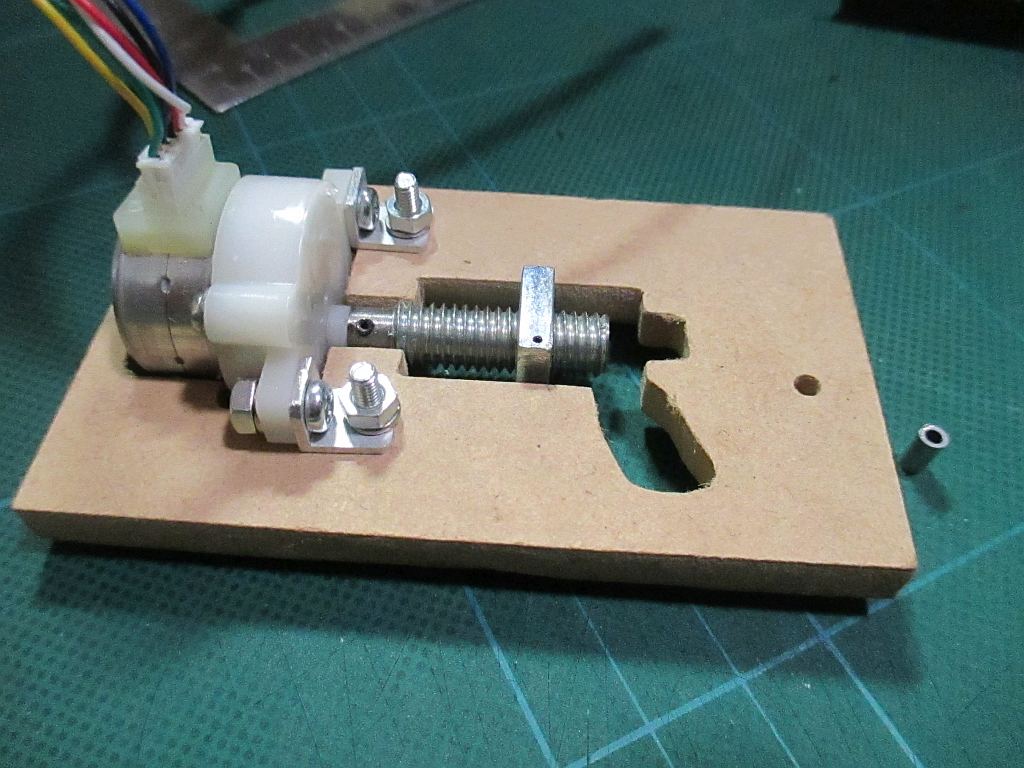
(写真上) モーターにネジを取り付け、そこに四角いナットを可動子としてセット。
モーターが回転すれば可動子が移動する。
アルミのパイプは移動するテコの支点となるネジを差し込むための物。
MDFはやわらかいので、何度もポイントを稼働させてるうちに穴がバカになっても困るので。
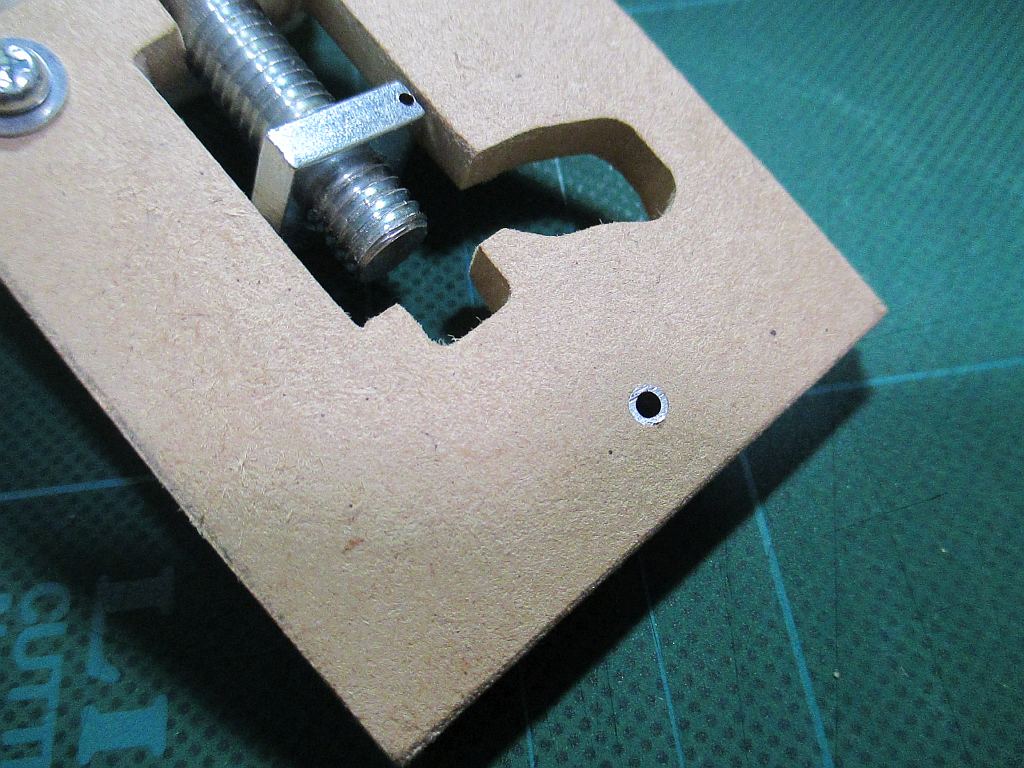
(写真上) 3mmのアルミパイプに下穴は2.8mm。
バイスで挟み込んで圧入。
(写真上) ナットの可動子がそのまま動くとベースのMDF材は削れるだけなので、両サイドをアルミのアングルで補強。
位置は少しずらして可動子があたった力がかかる部分だけをカバー。

(写真上) ポイントのトングレールが取り付けられているスロウバーを動かすテコの加工。
テコの支点とは反対側の作用点の部分にネジを埋め込み、そこに1.2mmの穴をあける。

(写真上) ・・ダメじゃん。ネジが斜めになってる。
でも、ひとまず、これでテストじゃ。
ちなみに、ネジの頭に開けた1.2mmの穴に、径が1mm真鍮の小鋲が入る。 この小鋲でスロウバーを動かす。
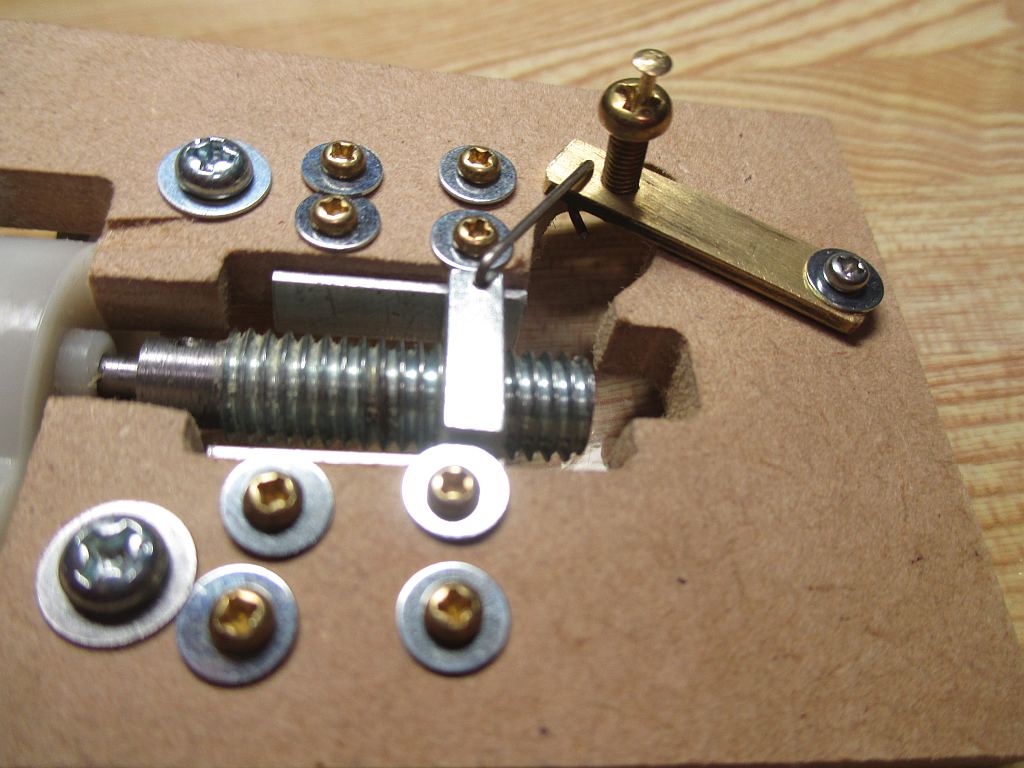
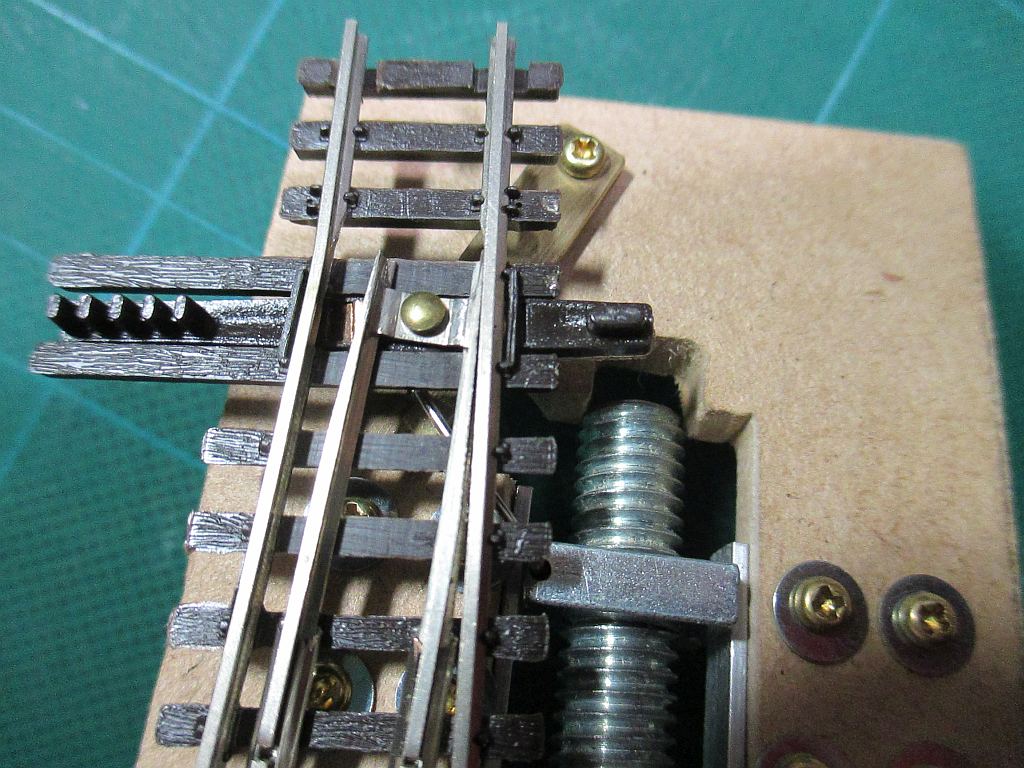
(写真上) スロウバーを動かす機構部はこんな感じ。
テコとなる真鍮板の力点部分とナットの可動子はピアノ線で結んである。

(写真上) 可動子がモーターから一番離れた時の状態。
(写真上) 可動子がモーターの一番近くに来た時の状態。
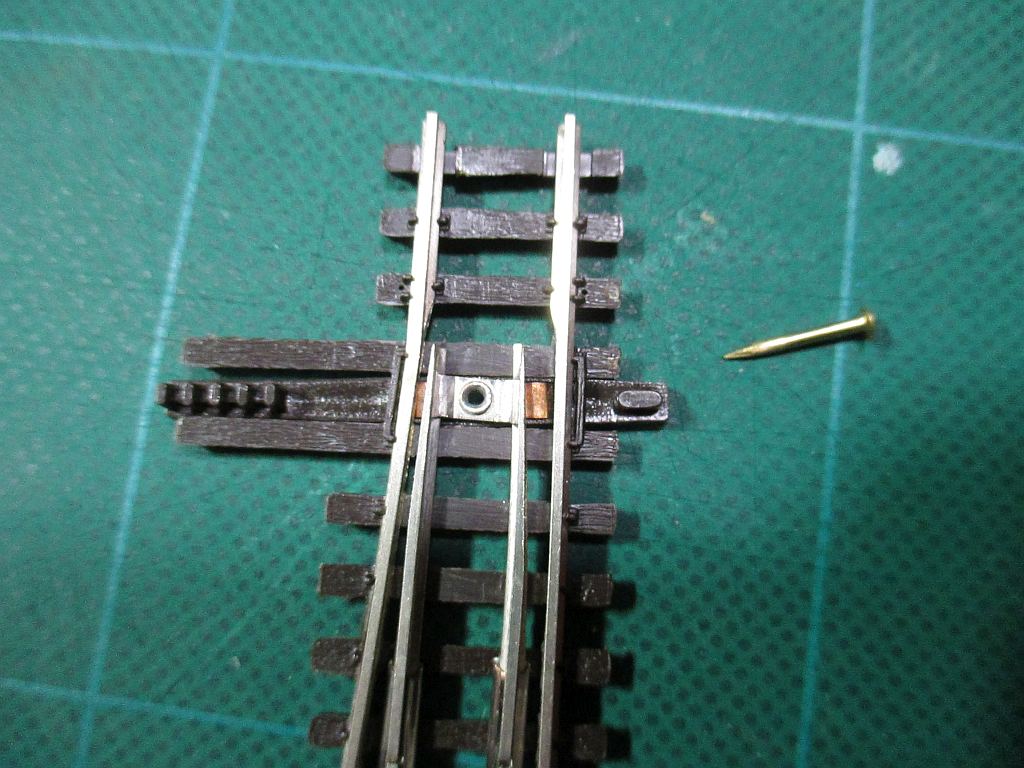
(写真上) スロウバーとそれを動かす真鍮の小鋲。
ポイントは今は無きシノハラのポイント。
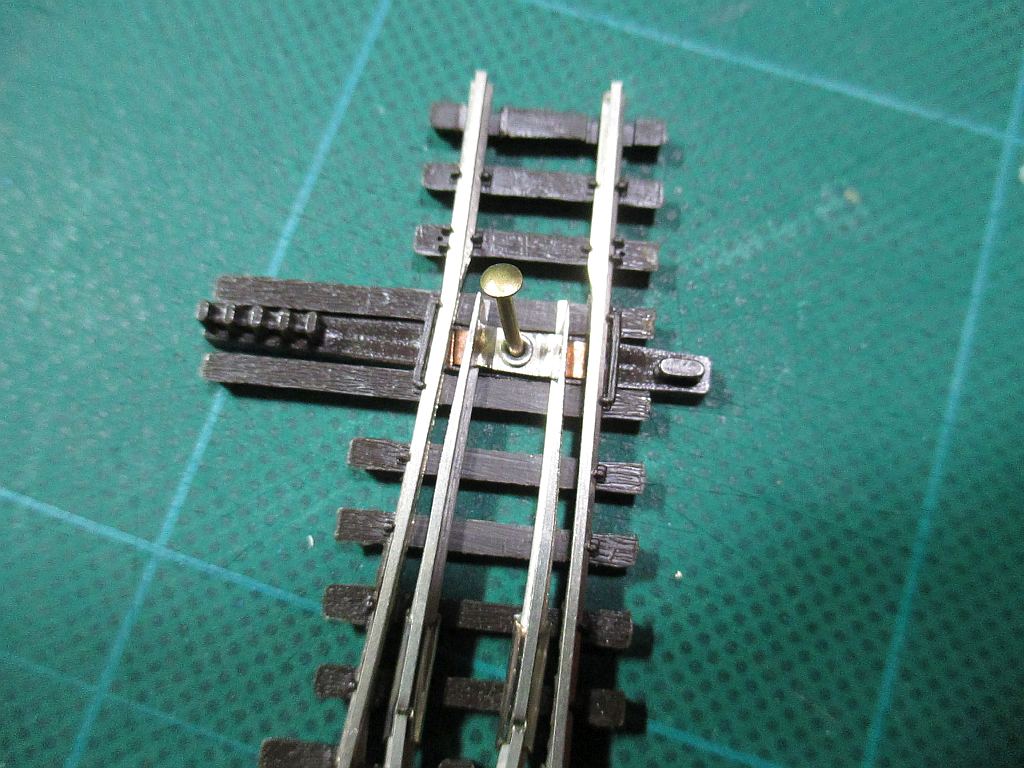
(写真上) スロウバーの穴に真鍮の小鋲を差し込んだ時、若干の遊びがでるように小鋲を削った。
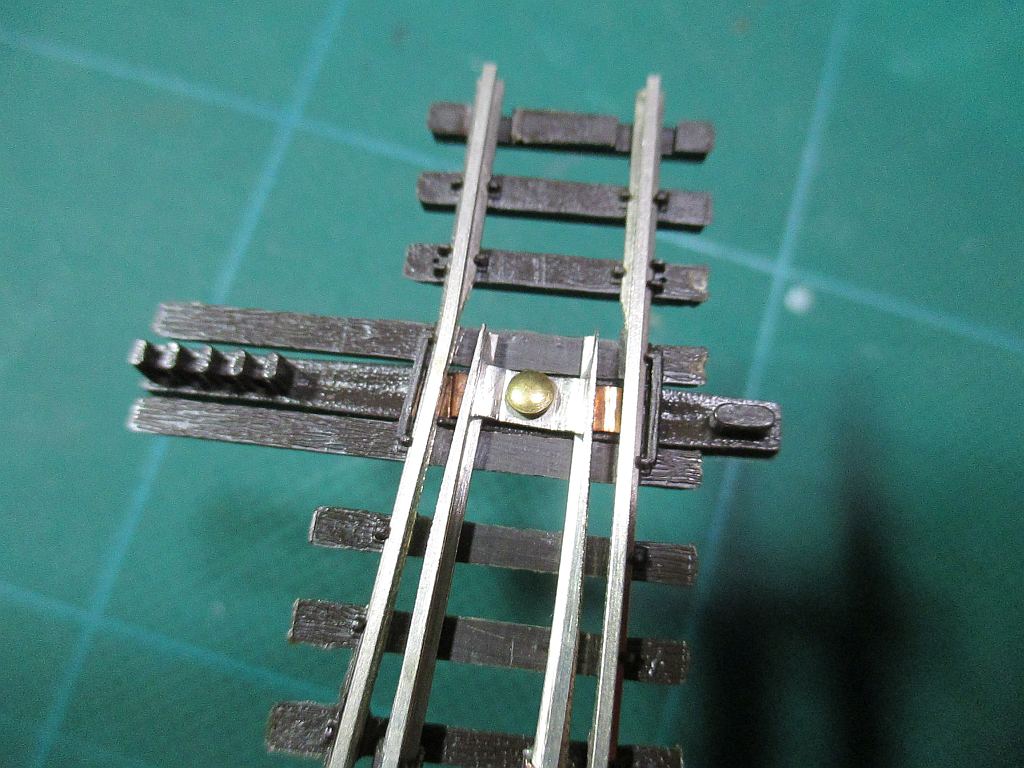
(写真上) スロウバーに真鍮釘を差し込んだところ。
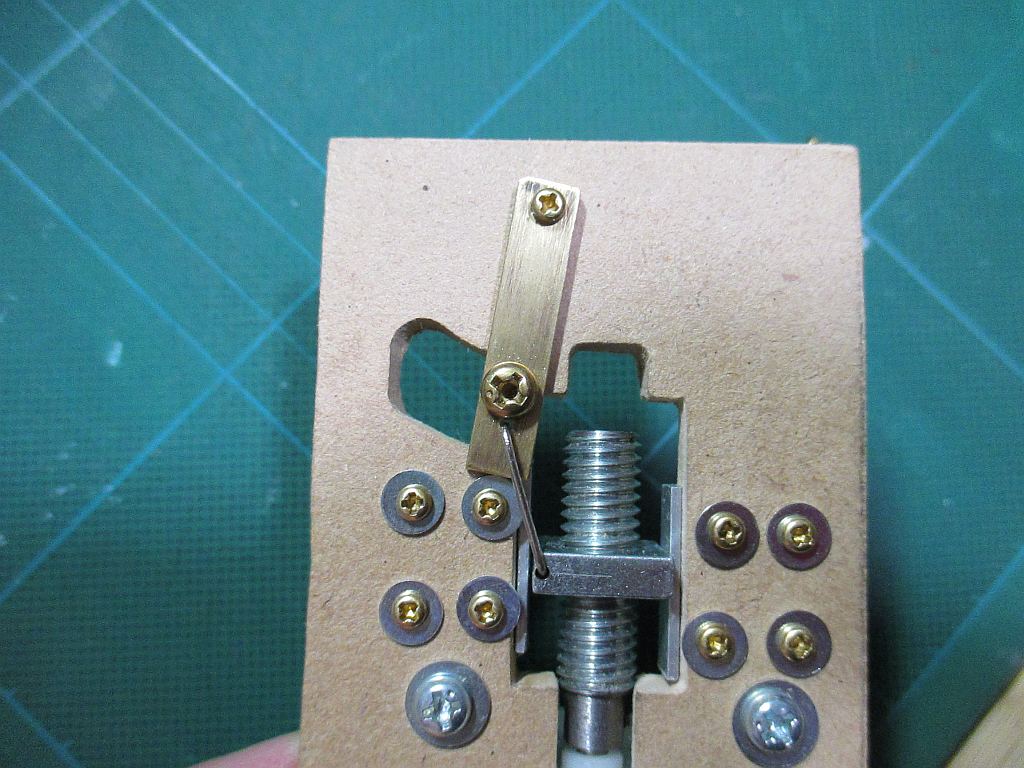
(写真上) 組み立てるとこんな感じに。
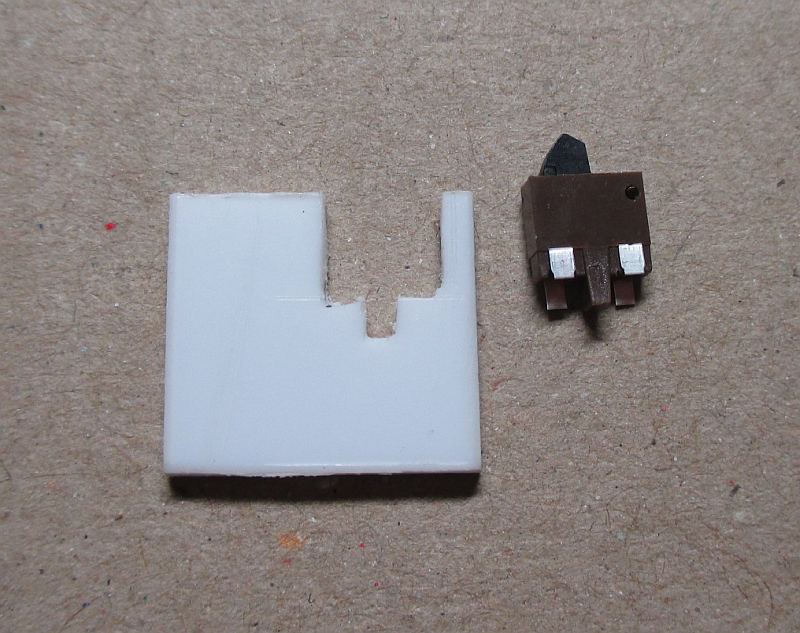
(写真上) モーターを停止するためのスイッチは小型のディテクタスイッチ。
これを可動子が移動してきて押すとモーターが停止する。
スイッチは位置決めのを容易にするために両面テープを使う。
ディテクタスイッチ自身は幅6mmくらいの小さいものなのでテープはすぐ剥がれてしまうだろうから、大きめのプラ板に一旦取り付け。
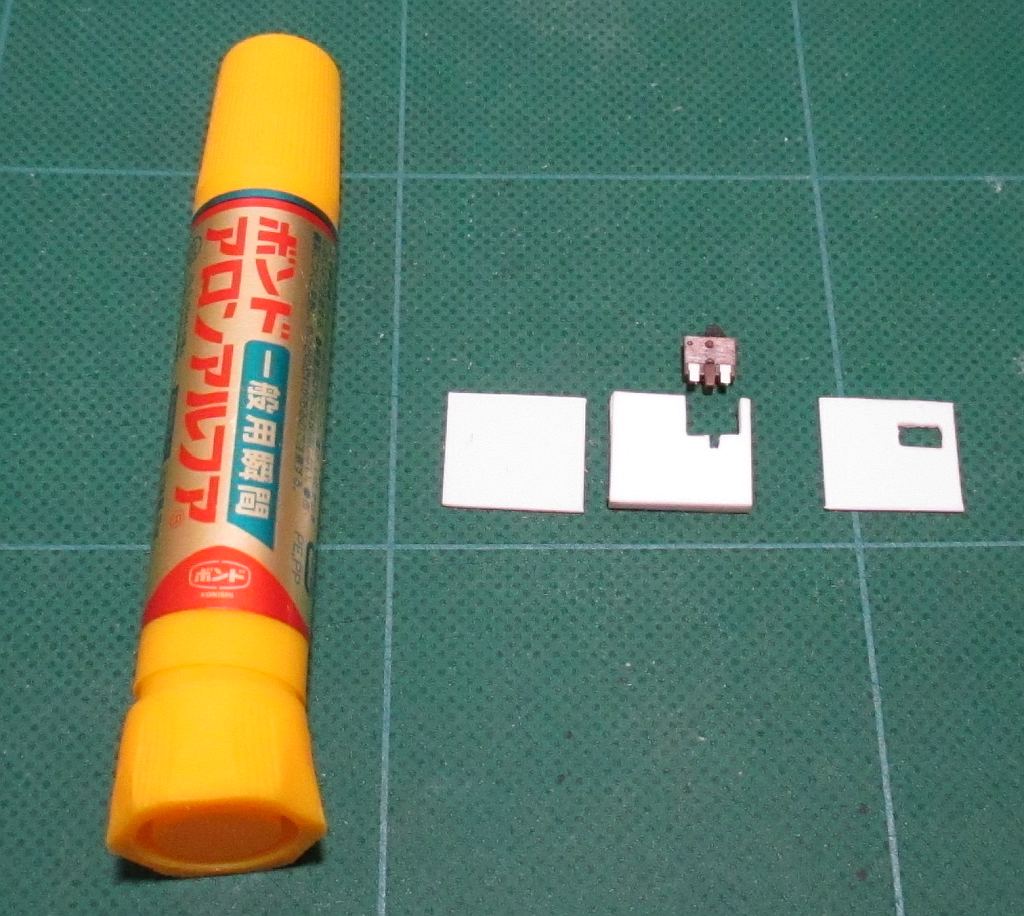
(写真上) プラ板への取り付けは瞬間接着剤。
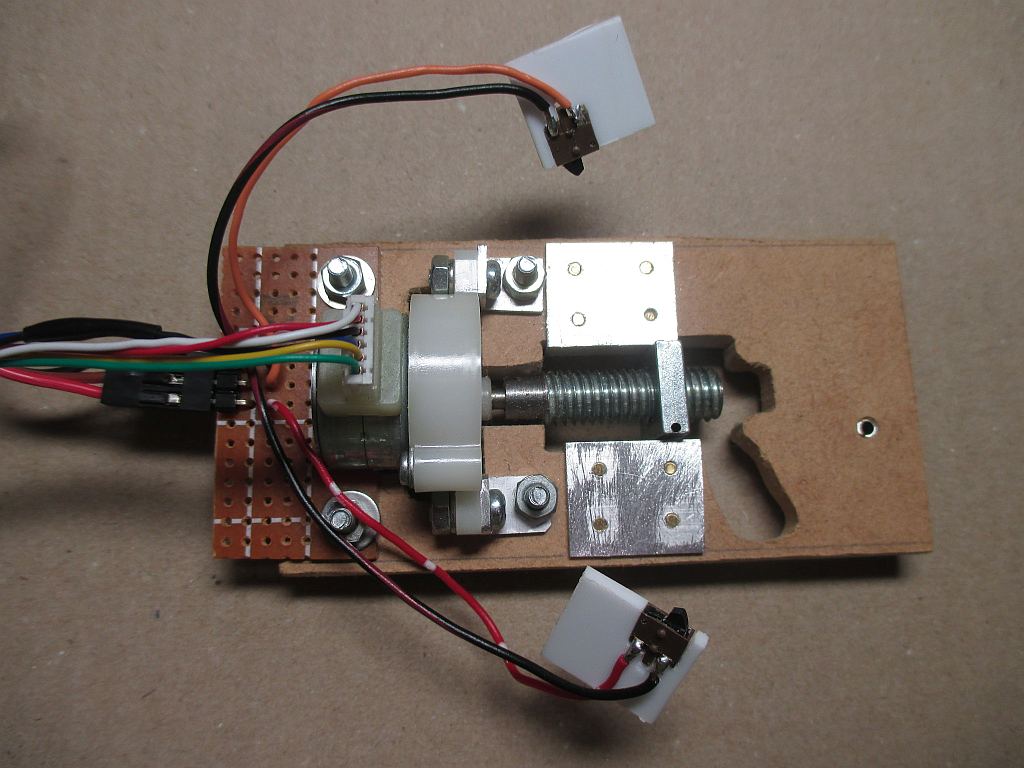
(写真上) モーター、スイッチへの配線は基盤に取り付けてポイントマシンのベース板の後方に。
プラ板へ取り付けたスイッチは実際にポイントマシンを取り付ける時に位置を調整する。
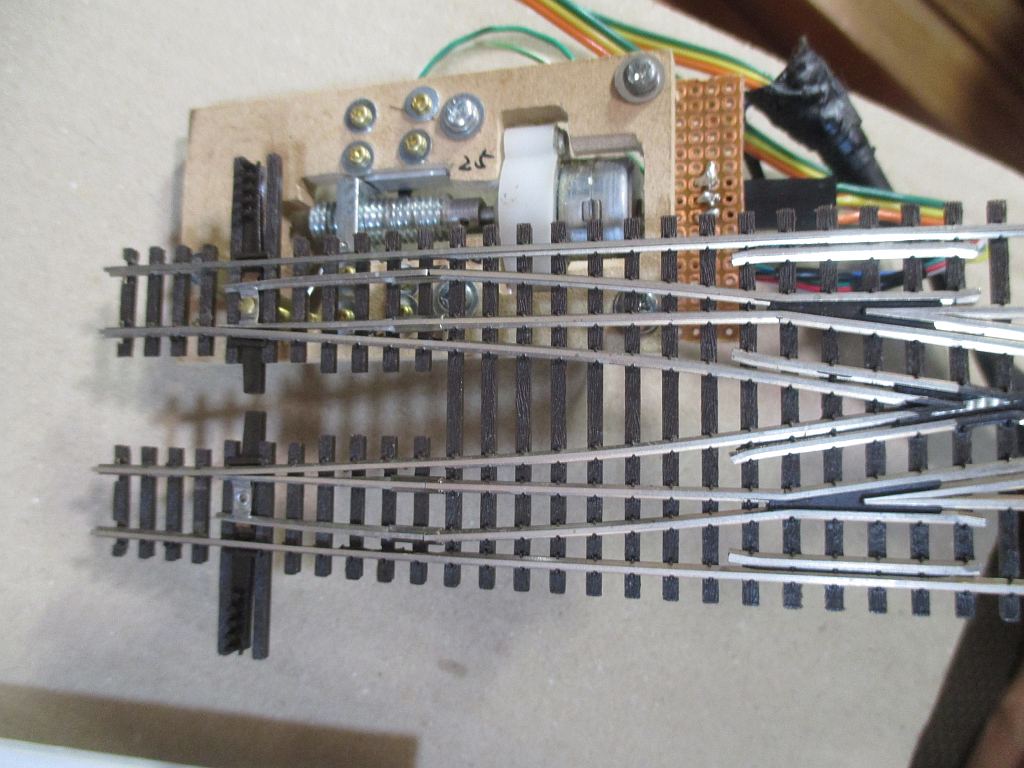
(写真上) ポイントマシンが集中するシーサースクロッシングに取り付けたところ。
狭い場所に4個のポイントマシンが集中する。
このため、テコが振る方向を右にしたり、左にしたりするベースが必要となった訳でした。
ウ~ム、やっぱちょっと大きいなぁ・・ブツブツ
・・が、レイアウト製作までに月日が流れすぎた
2022年12月
サーボモーターの価格は下がってしまった。
機構が複雑になるが、安価にできると思って作ってきたステッピングモーターを使ったポイントマシンは・・却下。
紆余曲折の経緯は置いておくとすると・・
結論としては・・レイアウトにはサーボモーター版を取り付けることにした。(^^;
↓ これです。



