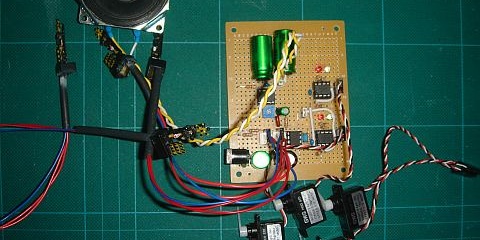
Nケージ用踏切の警報音とLEDの点滅部ができたので、続いては遮断機の部分。
サーボモーター版ポイントマシン・・完成 (その9)
機構が複雑になったNゲージ用のステッピングモーターを使ったスローアクションのポイントマシン。
簡素なサーボモーター版に作り変えていたのだが、サーボモーターの制御ができただけで満足して作業を中断していた。
やっとやる気になってなんとか完成までこぎつけた。
やる気をそいでいたのが不良率が多かった安価なサーボ。
レイアウトに取り付けても容易に交換できるようにしておかないと・・ということで取り付け方法などを考えていたらズルズルと日が過ぎていた。
そこで、テスト用のボードを作ってサーボの動作確認がやり易いようにしてみた。
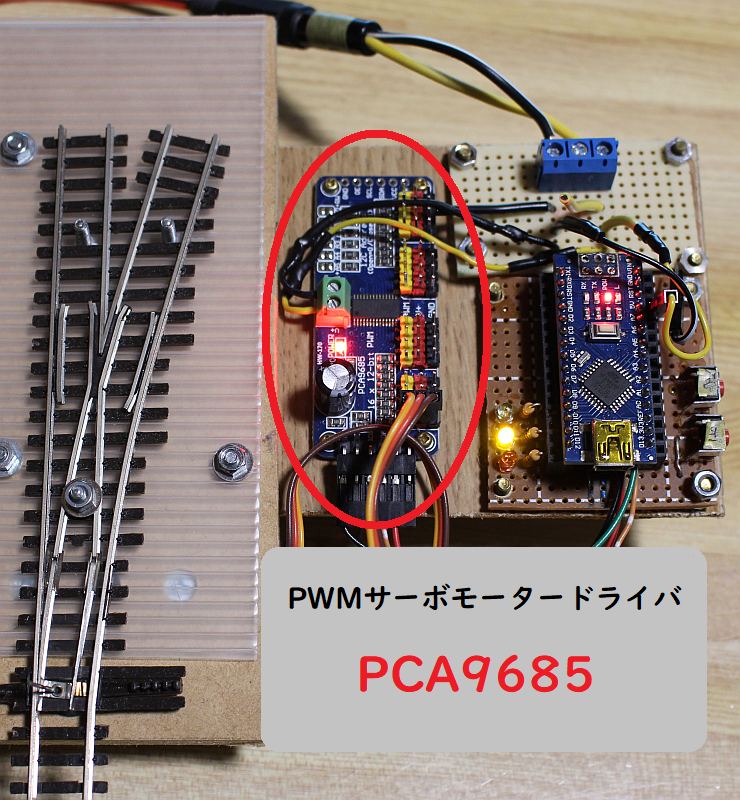
(写真上) サーボモーターを直接制御するのは「PCA9685 PWM Servo モーター ドライバー」。
1個で16個のサーボモーターを制御できる。
ACEIRMC PCA9685 16チャンネル 12-ビット PWM Servo モーター ドライバー IIC モジュール Arduinoに対応 ロボット (3個)
ACEIRMC
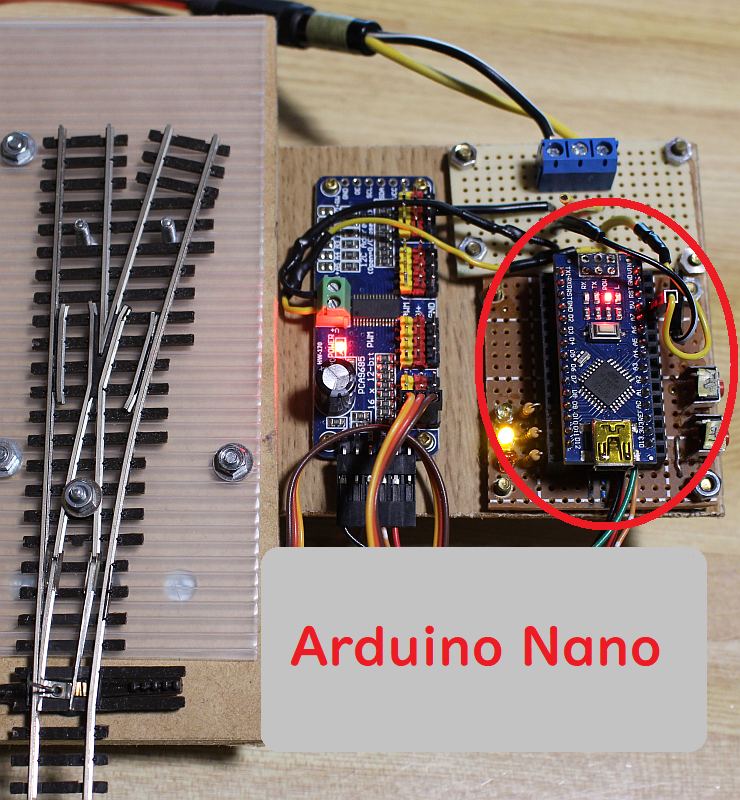
(写真上) PCA9685 PWM Servo モーター ドライバーを制御するのはArduino Nano。
ここまでは前回出来上がっていたもの。
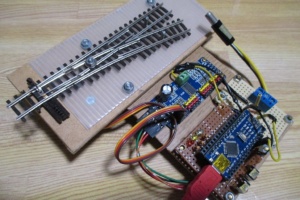
今回実際にポイントを転換する部分を作った。
このテストボードでサーボモーターの可動範囲を調整し、実際のレイアウトに設置することにした。
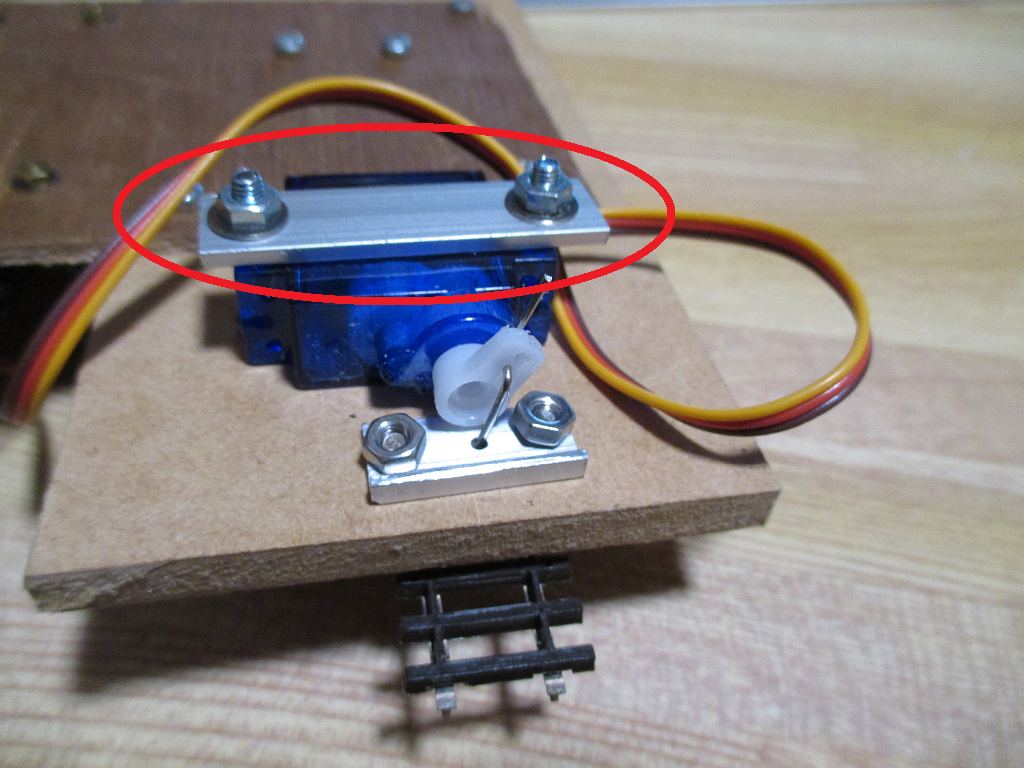
(写真上) サーボモーターはアルミのフラットバーで押さえつけて止める構造。
レイアウト裏面に伸ばしたm3のネジにフラットバーを止める簡単なもので、サーボモーターの取り付け、交換は容易にできる。
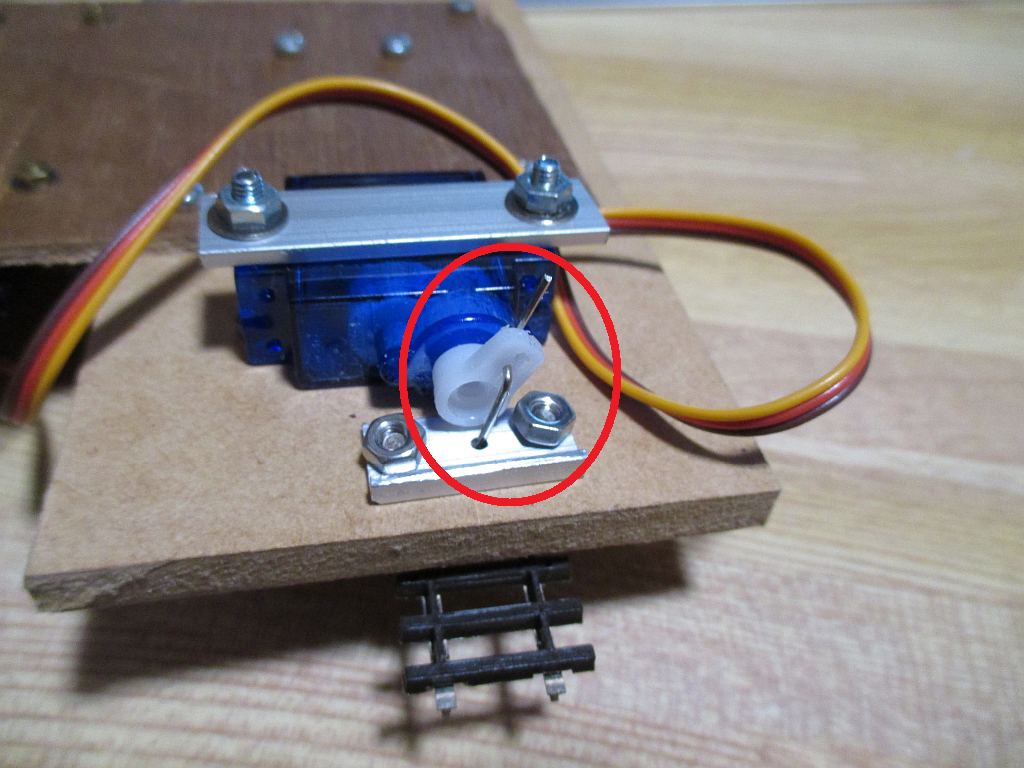
(写真上) サーボモーターのホーンとポイントマシンのトング部分とはピアノ線で接続。
レイアウト裏面から表部分にピアノ線が通るところには、ピアノ線の太さより少し大きめの穴をあけたアルミ材を設置。
ここが支点となってポイントが転換できる。
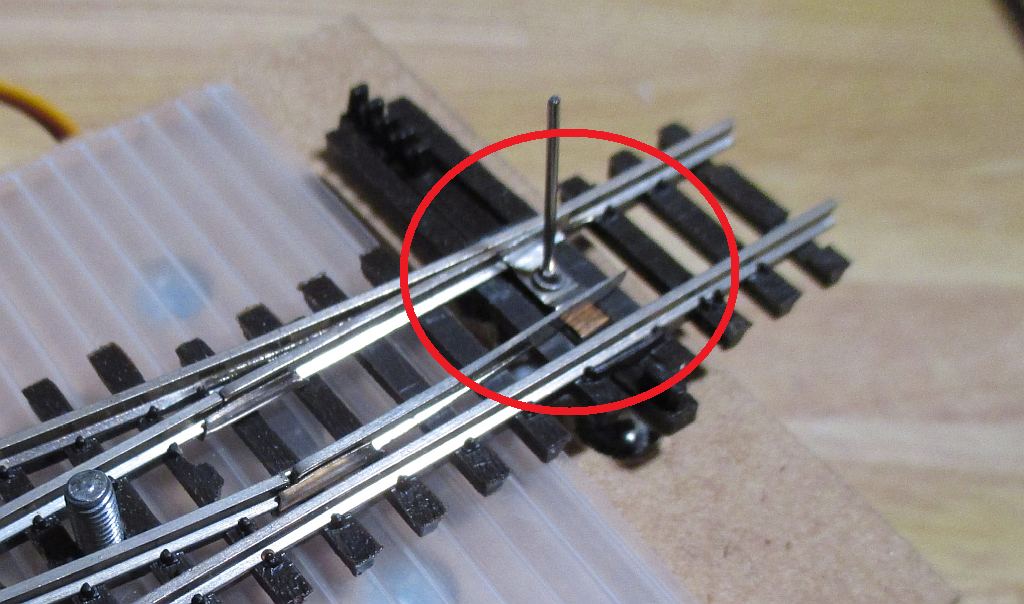
(写真上) ポイントマシンは今は無きシノハラのもの。
トング部分はPECOのものと違い、定位、反位でカチッ、カチッとは位置決めできない。
そのためスローアクションの動作の再現に向いている。
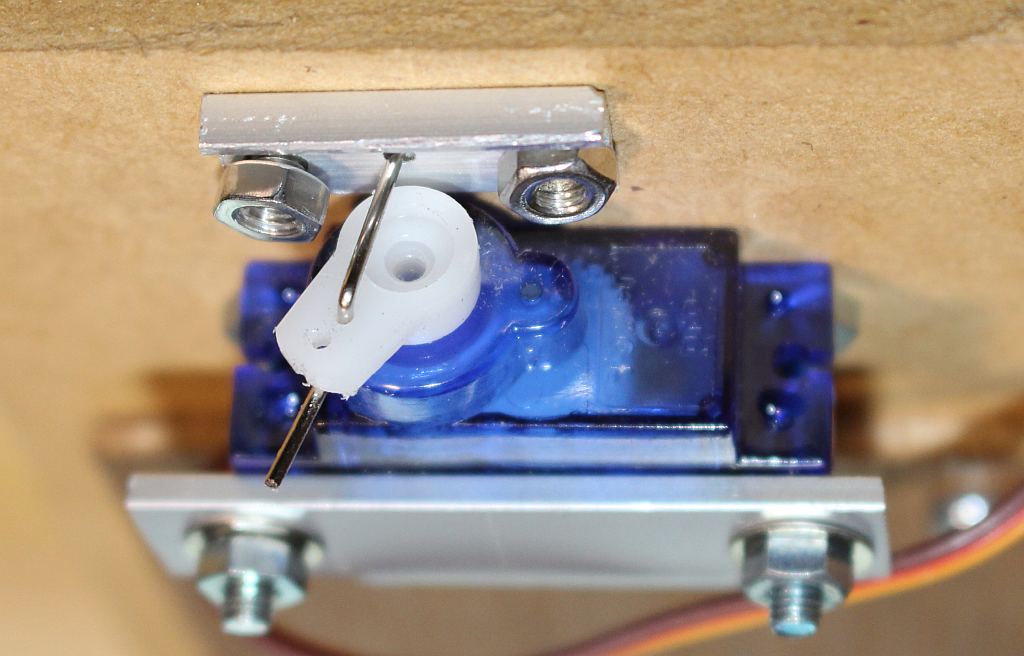
(写真上) サーボモーターは、レイアウト裏面に取り付けるが、梁などを考慮してホーンは短めにした。
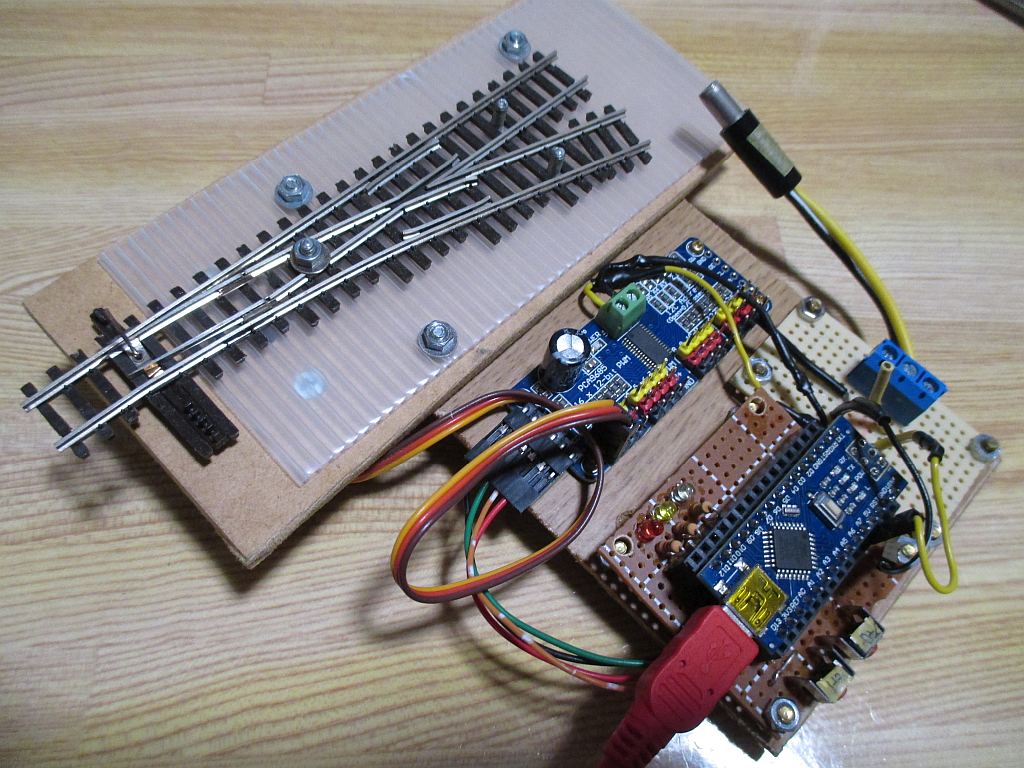
(写真上) スローアクションのポイントマシン(サーボモーター版)テストボード。
この前の記事は
・・「ポイントマシン・・・作り直しじゃ~ (その8)」