







MP3デコーダICのVS1011E。 つい先日まで秋月電子でDIP化基板にハンダ付けされていたLQFP-48パッケージが売られていたが、今はなくなっている。 VS1011Eは終息に向かっているのだろうか。やむなく変換基盤を買って自分でハンダづけ。
Nゲージレイアウト用制御盤 (その15) メインレイアウト部分の左ハンガー

これまで作ってきていたメインの制御盤。
作業が進むにつれ、制御盤とレイアウト間の配線等々に問題が・・
さらに、スペース的にもこれ以上メインの制御盤にいろんな機能を持たせるのが困難な状況に。
予想通り・・行き当たりばったり方式は行き詰ってきた。
そこで、メインの制御盤のモジュールをレイアウト台枠上に移設してきた。
「Nゲージレイアウト用制御盤 (その11) 周回駅部分のアナウンス制御盤」
「Nゲージレイアウト用制御盤 (その12) 周回駅部分のコントローラ」
「Nゲージレイアウト用制御盤 (その13) メインレイアウト部分のコントローラ」
「Nゲージレイアウト用制御盤 (その13) メインレイアウト部分のコントローラ」ではコントローラ(パワーパックに相当)を台枠中央の側面に取り付けた。
今回は、今まで作ってきていたモジュール類をコントローラの横っちょ(左側)(下の写真の赤枠部分)に取り付けた。

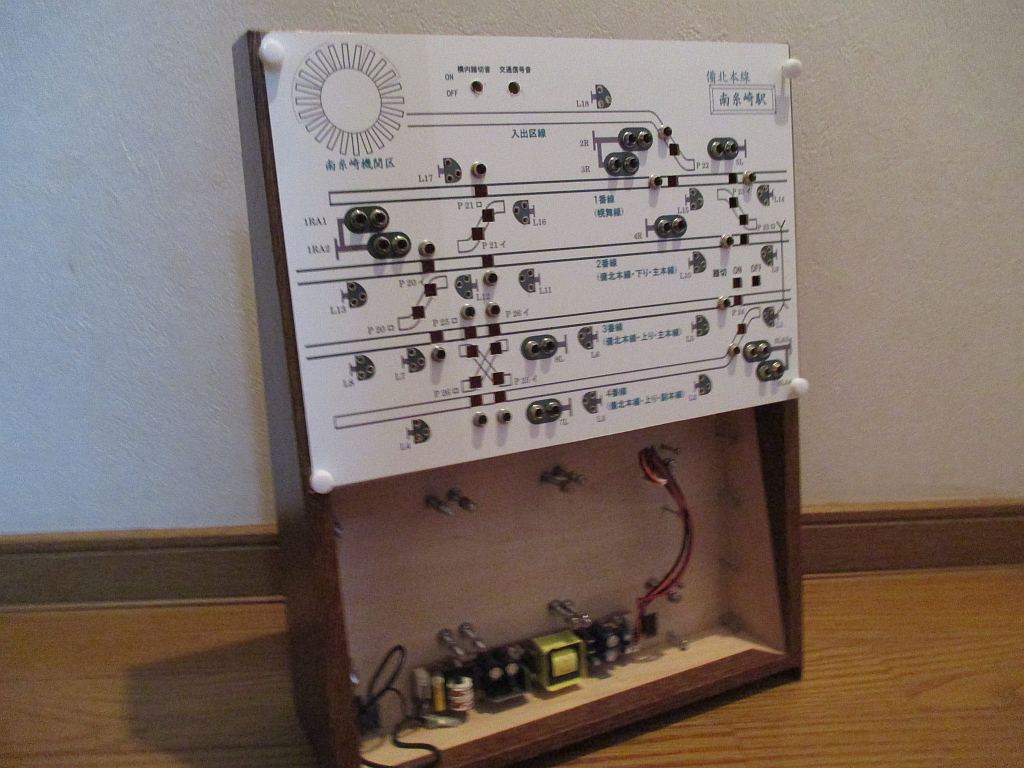
(写真上) これは、「幹線駅制御盤(補助制御盤)」。
今回取り付けるモジュールはレイアウト横に設置するこの幹線駅制御盤と連動して動作することになる。

(写真上) こんな感じで取り付けた。
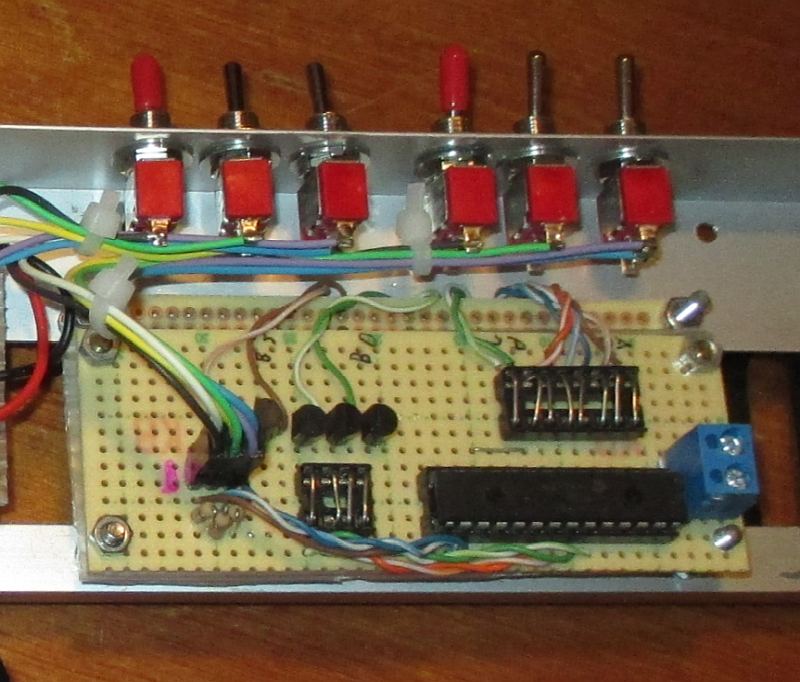
今回取り付けた左ハンガーのスイッチ類。
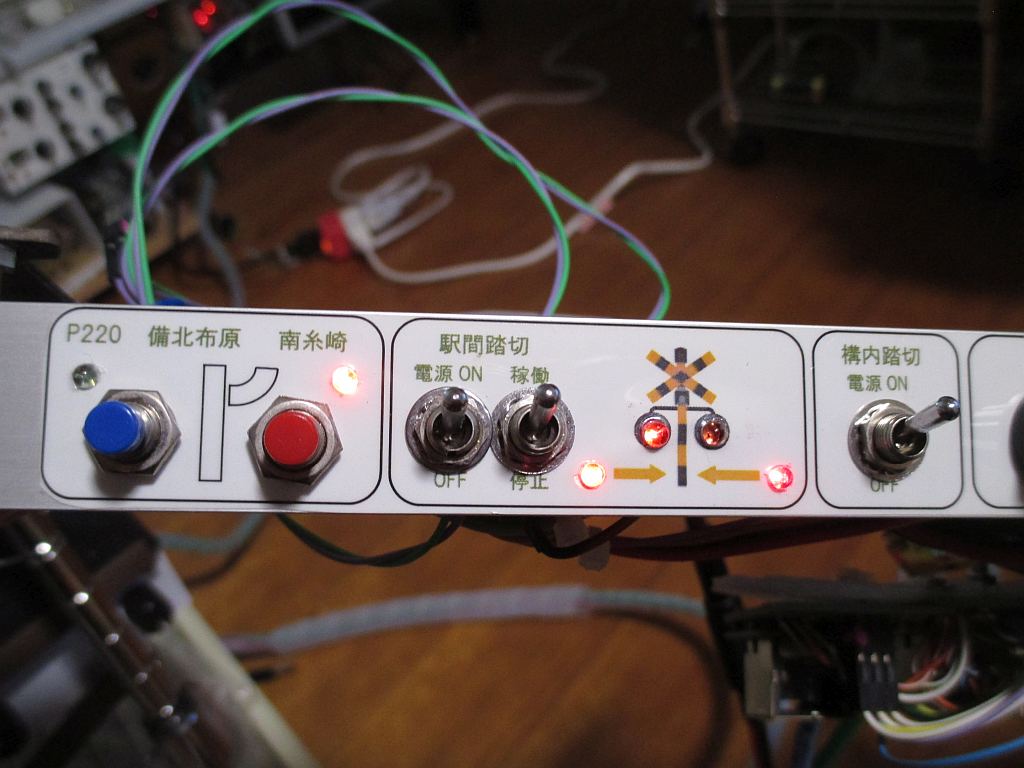
(写真上) 左から、TOMIXポイントの転換スイッチ。
駅間踏切の電源スイッチ、手動起動スイッチと動作確認LED。
構内踏切音の電源スイッチ。

(写真上) 左側は機関区部分のPWMコントローラ(パワーパック) 。
その右隣は入出区線にこのコントローラから給電するのか、駅側の線路のコントローラから給電するのかを切り替えるためのスイッチ。
PWMコントローラでは動作しない機関車があった場合、駅側の線路にTOMIX、KATO等のコントローラから給電し、機関区にもそれから給電する。


(写真上) 3つの押しボタンのうち、緑のはターンテーブルの位置がずれているときに微調整するためのスイッチ。
赤色のはターンテーブル回転中に機関車が横倒しになって「あ~、壊れる!!」というときなどに緊急停止するためのスイッチ。
やはり、この3つのスイッチはターンテーブルが間近で見られる位置に取り付けが必要なもんで。
もちろん、別のターンテーブル制御盤にもつけている。
・・制御盤だらけ。
どれが、どれを制御してるのか初めてレイアウトを見た人にはわからない。
(^^;

(写真上) 今回取り付けたハンガーの右部分には機関区と駅の照明のスイッチを取り付けた。
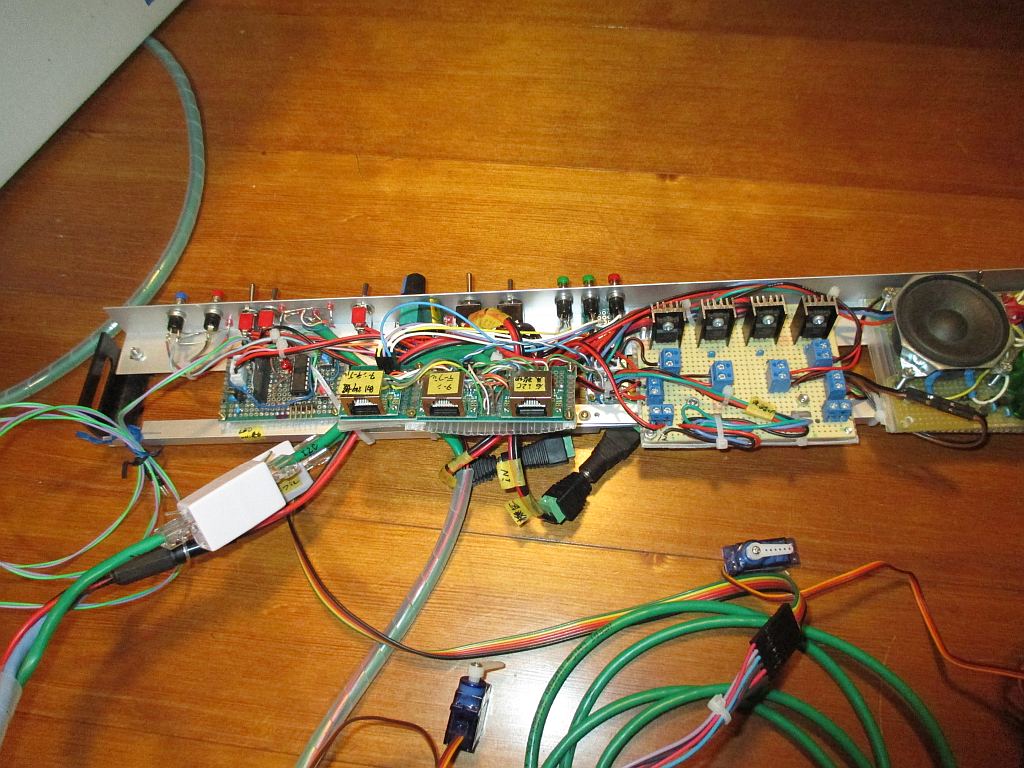
(写真上) 裏側にはゴチャゴチャといろんなモジュールがある。
前回取り付けた中央のハンガーも今回の左のハンガーも基本的には配線はコネクターで接続し、取り外して故障修理ができるようにしておいた。
TOMIXポイントの転換モジュール
レイアウトにはこのメイン台枠とコの字型に延長する台枠がある。
ここを連結して延長した台枠からメイン台枠上部には ループ線で駆け登ることになる。
ループ部分はTOMIXのレールを使用しており、ポイントもTOMIX。
その他のポイントは サーボモーターを使用したスローアクションのポイントマシンとなる。
進路の構成はマイコンで制御するので、このループ線のところもマイコンで制御するようにしておいた。
(写真上) これが、TOMIXポイントの転換モジュールである。
詳細は「Nゲージレイアウト・TOMIXポイントマシンの制御」で。
I2C用配線
制御盤の親玉であるRaspberry PIやレイアウト横に設置する「幹線駅制御盤(補助制御盤)」とはI2Cで通信する。
その接続にはLANケーブルを使用している。

(写真上) LANケーブルはモジュラージャックで脱着可能に。
さらに、この左ハンガーからは機関区のターンテーブルのモジュール、またメイン台枠の左右に追加するフィーダー用リレーのマイコン用にもここでI2Cの配線を分岐させる。
三端子レギュレータ
(写真上) このハンガーへは「幹線駅制御盤(補助制御盤)」から電源を供給する。
基本的には12Vと5Vを供給するが、12Vの一部はここで5Vに落としている。
ポイントマシン用のサーボモーターの電源もここから供給するが、容量が不足するようならここに別電源を引いてくるつもり。
・・電源容量が足りるのか、足りないのか計算する気は・・一切ない。
と、いうか、行き当たりばったりなので、あとどれくらいマイコンを追加するのかさえわからないので、使用容量の予測すらつかない。
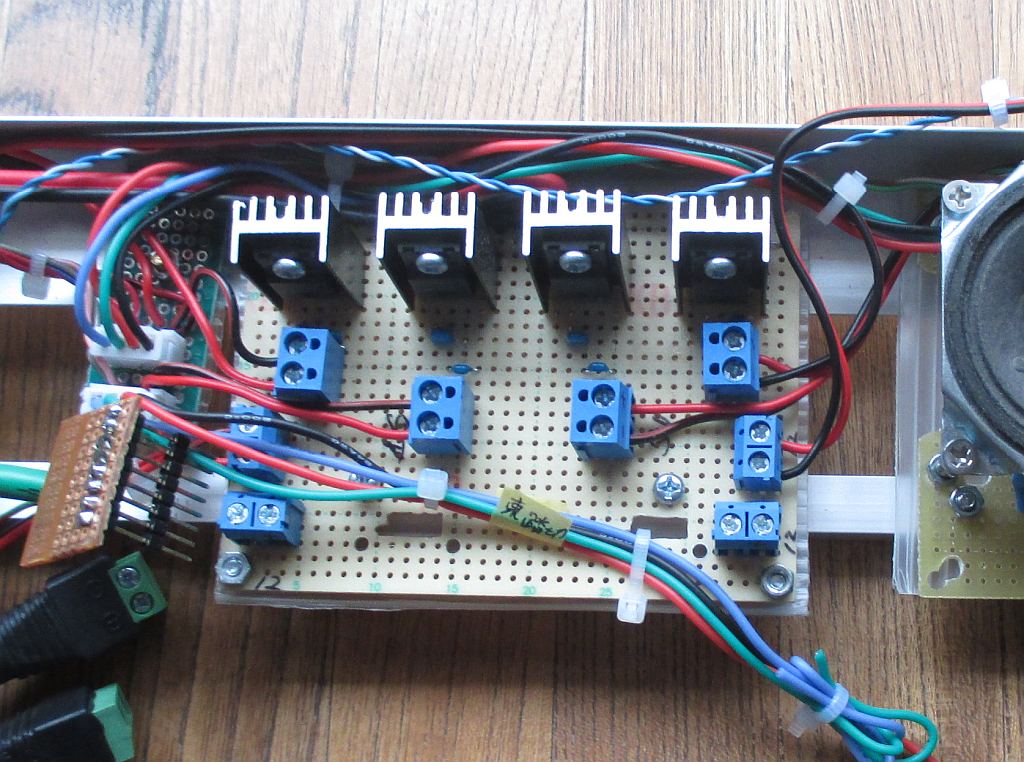
踏切音モジュール
(写真上) もう、何年も前になるが、固定式のレイアウトを作ろうと思った時、今どきのレイアウトなら音や光は必須でしょう、と試しに購入したのが既製品の踏切音のモジュール。
(茶色の基盤の物)
捨てることをしらないビンボー性のアタイはアンプをつけてこのハンガーにセット。
スイッチのON/OFFで踏切音が再生できる。
これは手動のまま設置して機関区の入出区線に機関車がきたら手動で音が鳴らせるようにした。
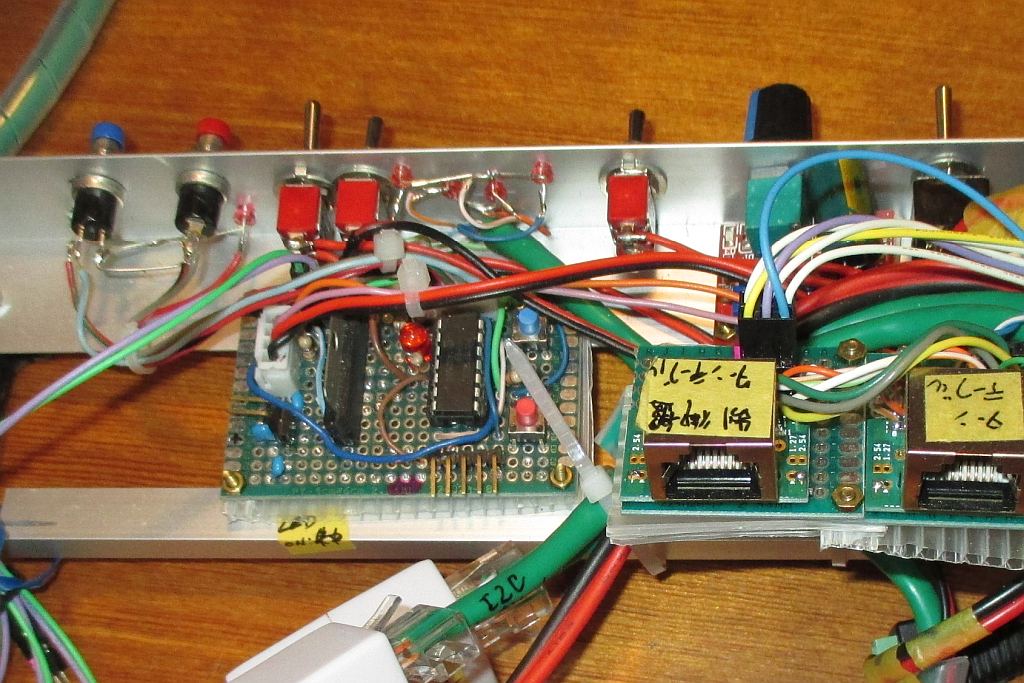
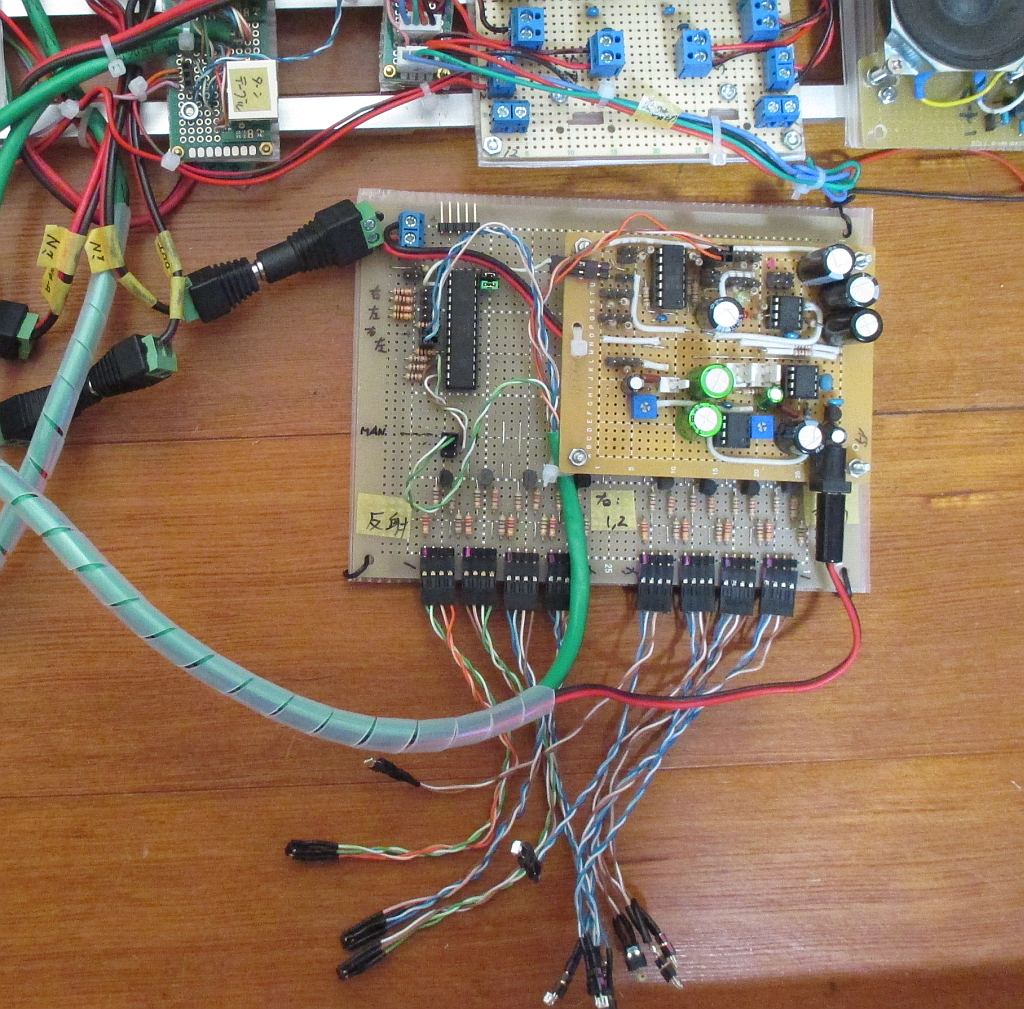
ポイントマシン制御
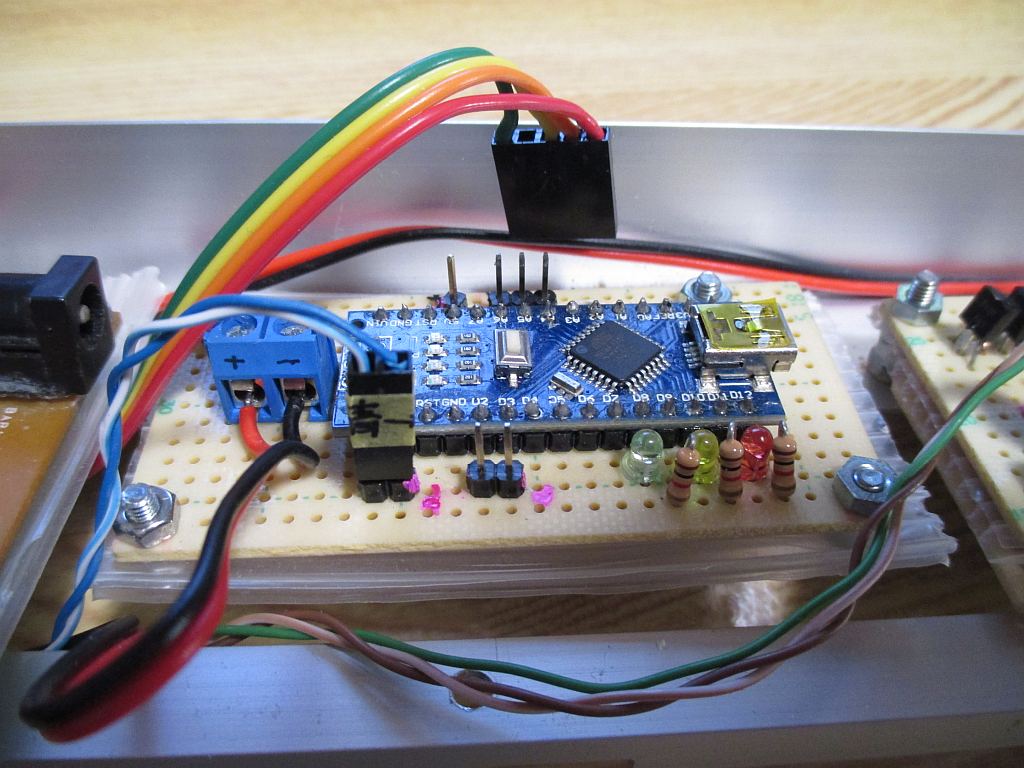
(写真上) サーボモーターを使用したスローアクションのポイントマシンを制御するためのArduino Nanoは左ハンガーにセット。
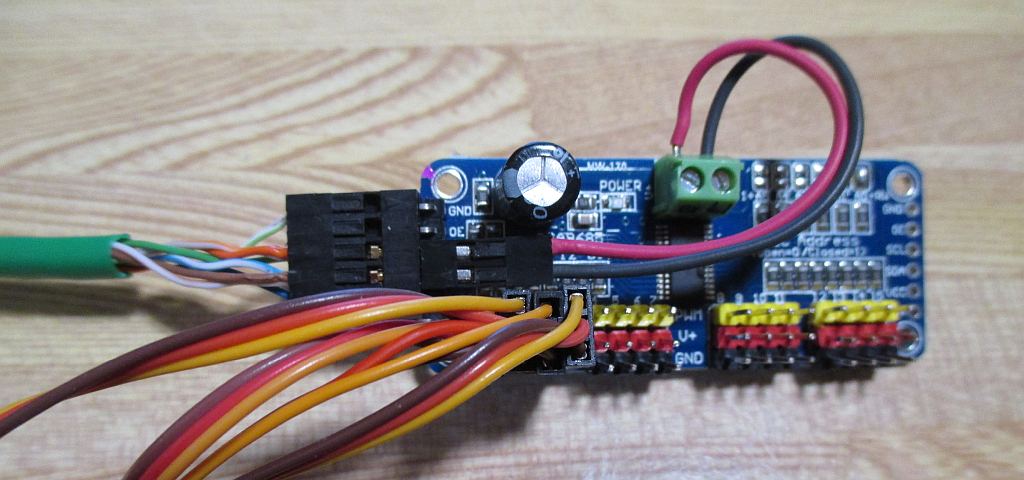
(写真上) 実際にサーボモーターを制御するのはこの「PCA9685 PWM Servo モーター ドライバー」。
これはサーボモーターの近くのレイアウト裏側に取り付けようと思う。
ACEIRMC PCA9685 16チャンネル 12-ビット PWM Servo モーター ドライバー IIC モジュール Arduinoに対応 ロボット (3個)
ACEIRMC
信号用モジュール
レイアウト上に設置する二色信号はポイントの転換状態等々によって赤/青の点灯を切り替える予定。
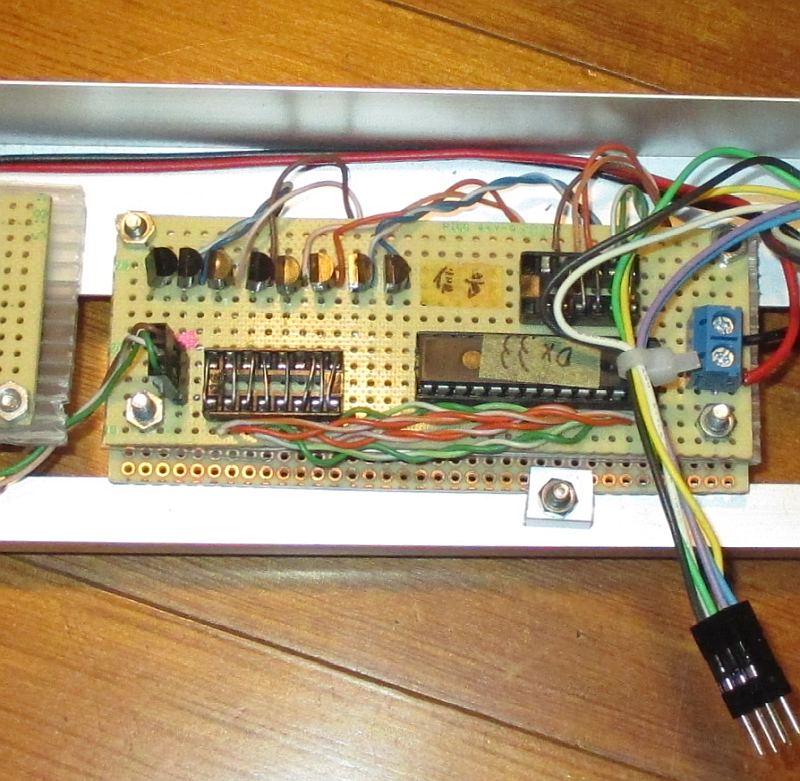
(写真上) これは、そのためのマイコン。
Raspberry PI→幹線駅制御盤(補助制御盤)を経由してI2Cでコマンドが送られてくる。
照明モジュール
(写真上) 駅の照明モジュール。
マイコンでLEDをダイナミック点灯させる。
ON/OFFのスイッチの他に明るさを変えられるスイッチも設置した。
機関区の照明は、スイッチのみこのハンガーに設置し、マイコンのモジュールは機関庫の下あたりに設置する予定。
照明用LED、信号用LEDの端子

(写真上) 駅の照明用LED、信号用LEDの端子はハンガーの上側に出るようにした。
ここから配線するが、この上部にはレイアウトの床面が来ることになる。
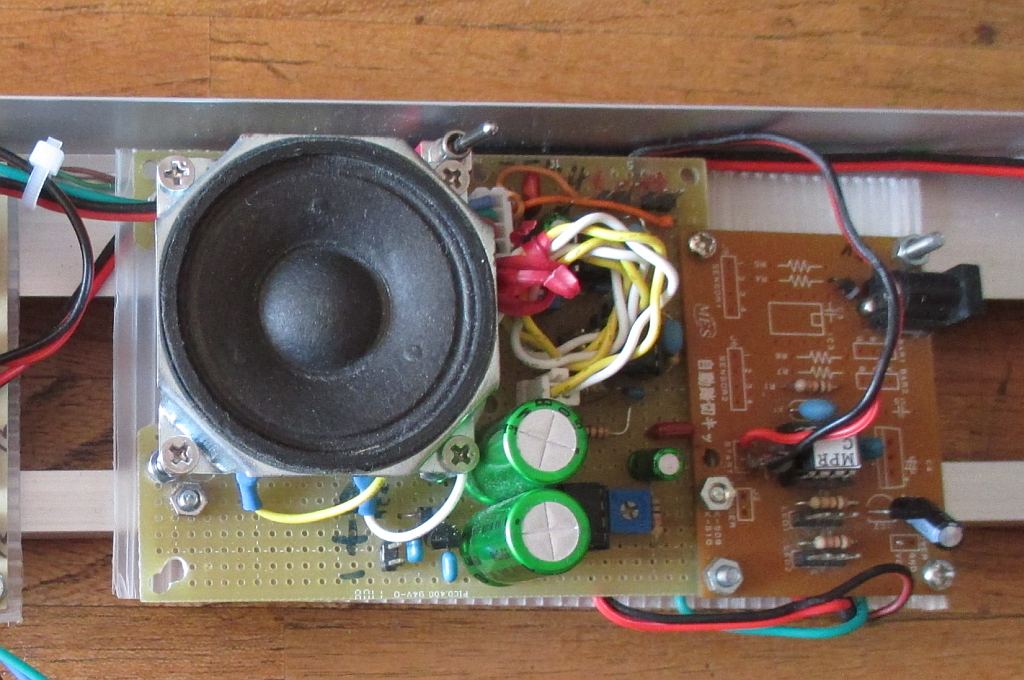
踏切モジュール
(写真上) 数年前に完成している踏切モジュール。
電源スイッチ等をハンガーに取り付けたり、実際にセンサーを配置しやすいように若干手直ししておいた。
この前の記事は
・・「NNゲージレイアウト用制御盤 (その14) 電源換装」



