Nゲージレイアウト用制御盤に駅のアナウンス類の音を再生するスイッチをPICマイコンで作って取り付けるのと、WAVプレーヤーの組み込み。
Nゲージレイアウト用制御盤 (その12) 周回駅部分のコントローラ
製作中のNゲージレイアウト。 ぼちぼちフィーダーの準備をすることに。
固定式レイアウトとはいえ、ベランダに出入りするためにキャスターをつけて前後に移動できるようにしてある。

(写真上)一方、制御盤はコントローラ(パワーパック)とポイント制御盤を一体化して作ってある。
ここには背面に制御の根幹となるRaspberryPIも取り付けてある。
この制御盤とレイアウト間はフィーダー、RaspberryPIが各マイコンを制御するためのI2C用の配線等々をワンタッチで脱着できるようにしているが、その数は10本以上。
実際に台枠を移動させる量は数十センチ程度であるが、この配線は邪魔になりそう。
・・作り変えじゃ。
現在のメイン制御盤

(写真上) ポイントを転換するテコを配置したり、LEDで進路の開通状態を示すのが緑色の部分。
コントローラと音響を制御する押しボタンを配置したのが白い部分。
(写真上) 現在、制御盤は自作のPWMコントローラ3個、市販のパワーパック1個がある。
また、外部の 電気機関車用コントローラからの入力もある。
都合5個のコントローラ。

(写真上) 上の丸い黒いのは、特定の線区を特定のコントローラに括り付けるのではなく、5個のコントローラをレイアウト下段の周回部上り線、周回部下り線、レイアウト上段の上り線、下り線、支線、入換の計6線区に振り分けるためのロータリースイッチ。
レイアウト下段の周回部
レイアウト下段の周回部にはエンドレスの上り線、下り線の2線区があるので、2種のコントローラを配置することにした。
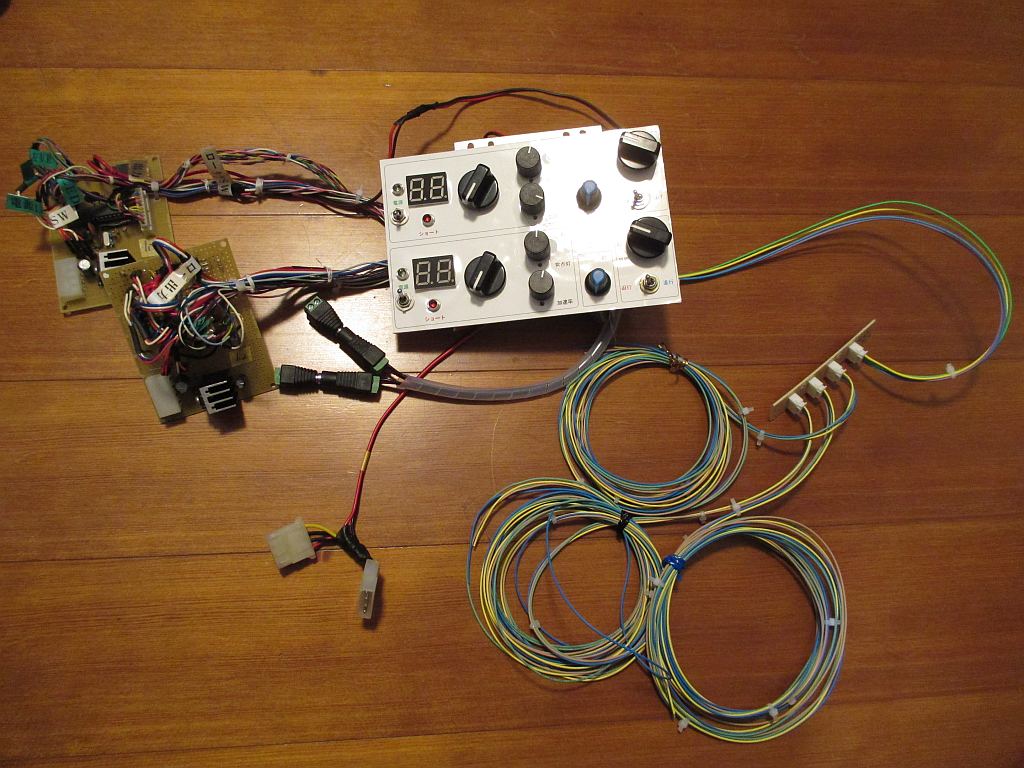
(写真上) 今回作り直したコントローラ部。
(写真上) 元々制御盤内部に作り込んであった自作PWMコントローラ2個を取り外してきた。
この自作PWMコントローラはロータリースイッチで指定したポジションで決めた速度まで徐々に加速し、ポジションを0に戻すと徐々に減速して停止するというもの。
車両が動き出す直前までの電圧をかけて照明を常点灯させる機能もある。
ただ、このコントローラでは徐々に加速して、徐々に停止するので停止位置を微調整するのが難しい。
また、PWMでは動かない車両もあるというので元々の制御盤では市販のパワーパックなども使えるようにしていた。
今回もその機能は残さなくては・・
停止位置を微調整するために新しいPWMコントローラを作ろうかと思っていたのだが、Amazonで安価なPWMコントローラを見つけた。
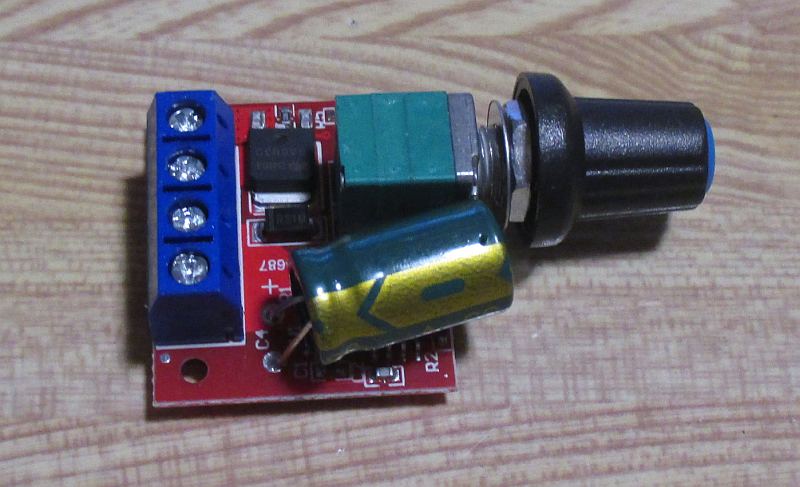
(写真上) 1個あたり260円程度と自作するよりかなり安価。
・・ただし、別に12V電源を用意する必要があるが。
安いには安いが・・品質が悪いという難点も・・
3個入りのうち、
- 1個目はひとまず問題なし
- 2個目は入出力ターミナルがかなり斜めに半田付けされていた
使用上は問題なさそうなのでそのまま使用することにしたが - 3個目は4ブロックある入出力ターミナルのうち、1つのターミナルのネジが固着していて全く動かず
やむなく基盤裏側に配線を直接半田付けした
一応すべてちゃんと出力されていたのでそのまま使用することにしたが正常品1/3。
まぁ、一か八か勝負、という人は買ってみてください。

アタイ、安さにひかれてもう3個購入したけどまだ未開封。
さて、勝負の行方は・・

(写真上) パネルは上り線用、下り線用の2段。
左の部分が自作PWMコントローラ部、
青いダイヤルのが市販PWMコントローラ、
右の部分がコントローラの切り替え用ロータリースイッチ。
自作PWMコントローラ、市販PWMコントローラ、市販のパワーパックからの出力のうち、どれを線路に給電するのかを切り替えるもの。
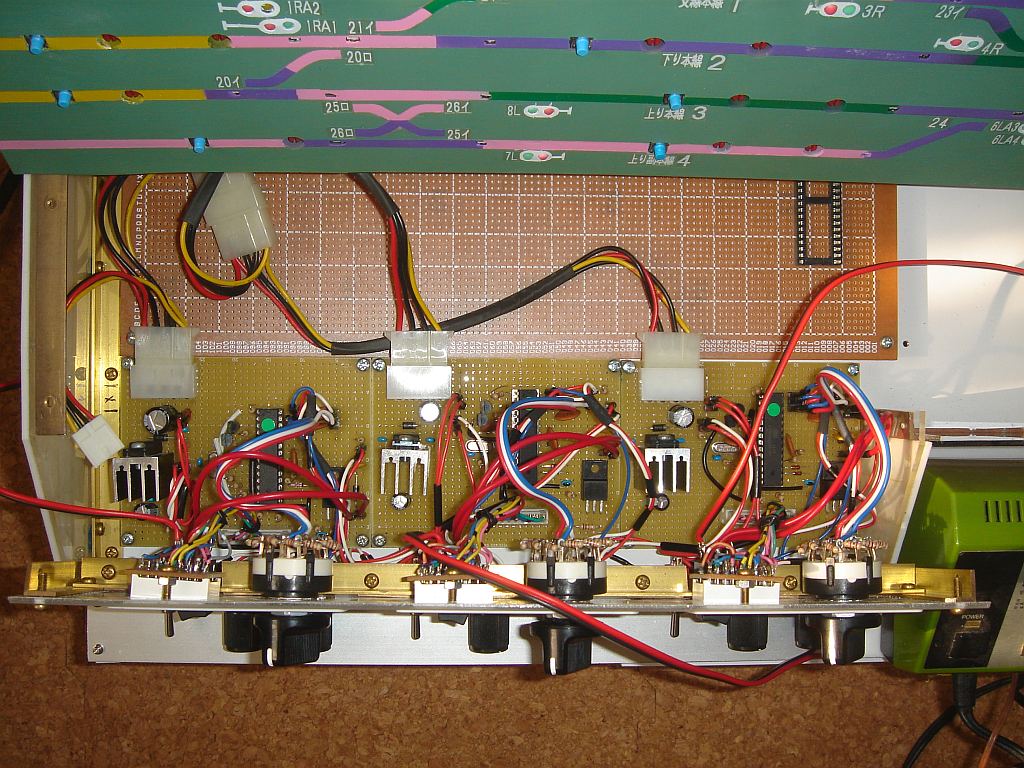
(写真上) パネルの裏面はこんな感じ。
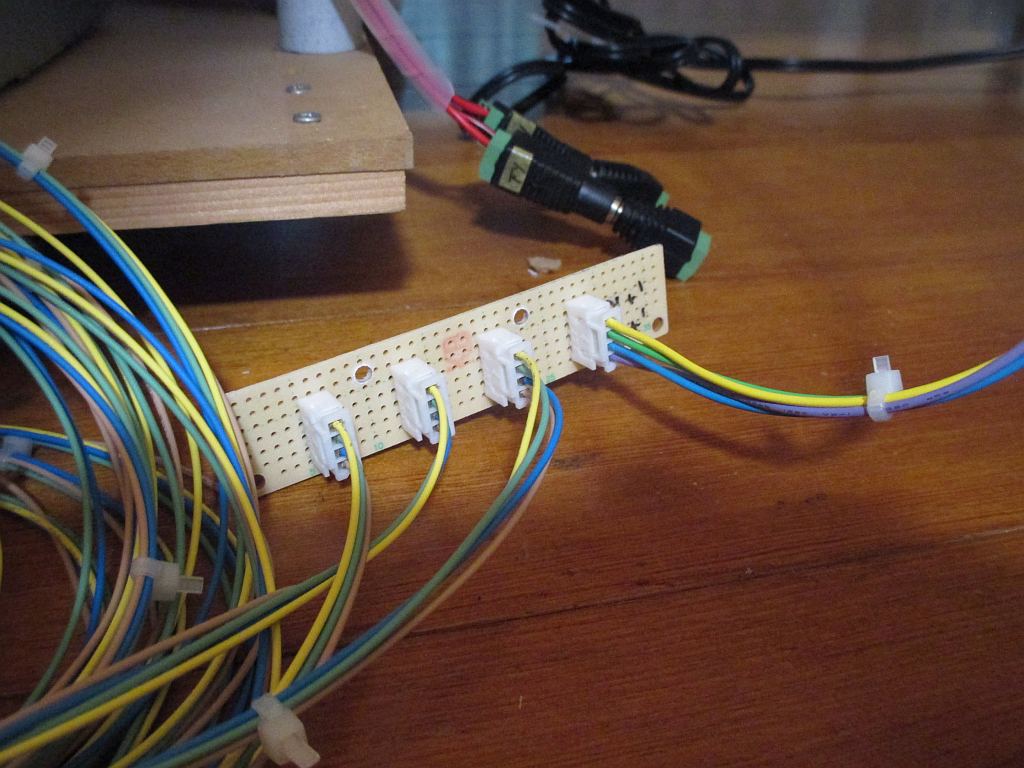
(写真上) 線路へのフィーダー部。
1周7~8mのエンドレスであるが接触不良、電圧降下の予想はできないので、上り線、下り線ともに各3箇所から給電することにした。
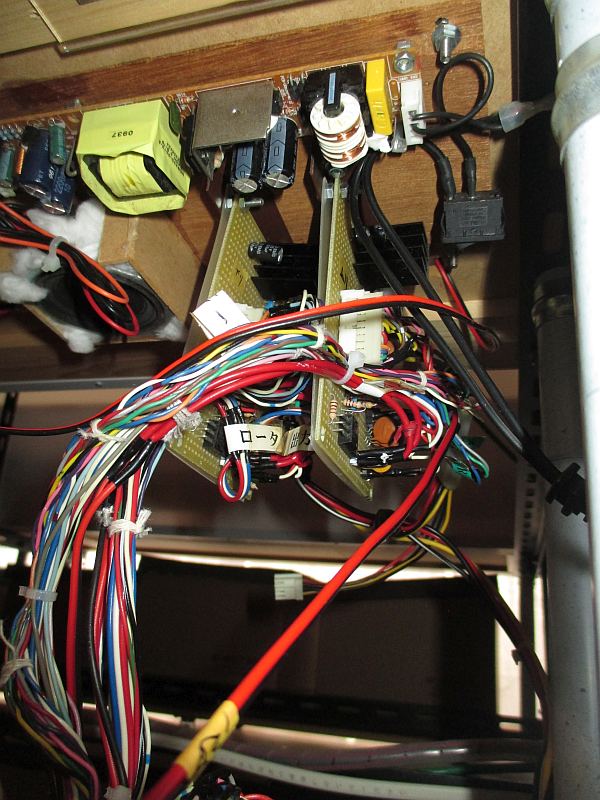
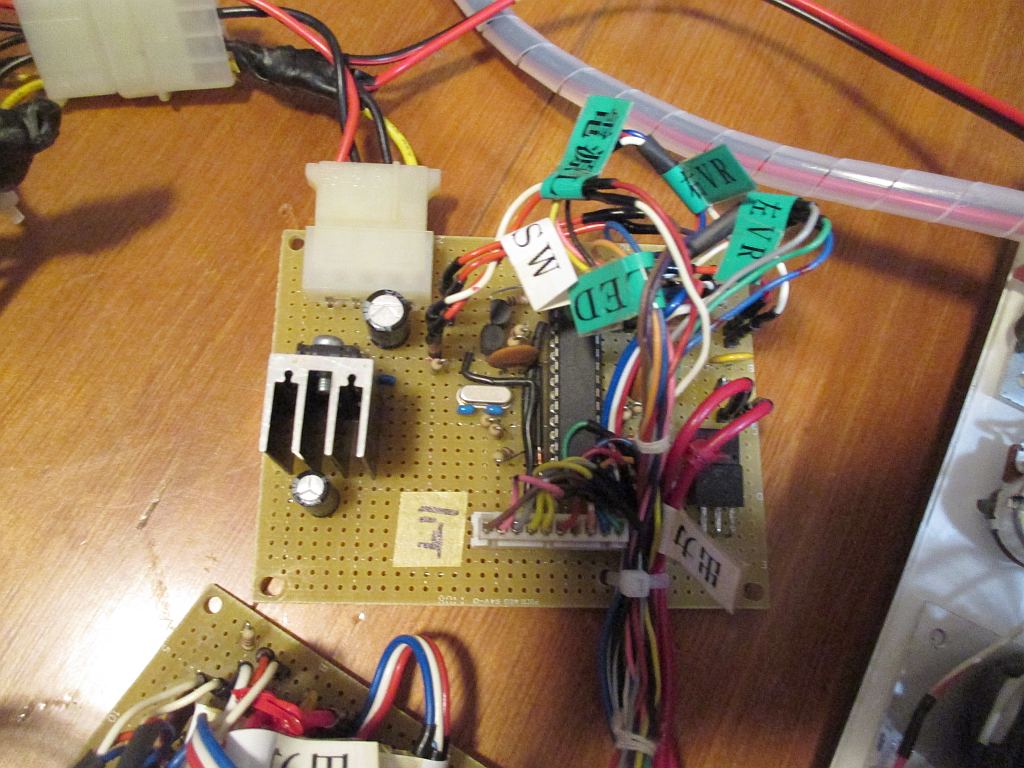
(写真上) 自作PWMコントローラの基盤は周回駅部分の床下に設置した。

(写真上) パネルは周回駅部分の床板側面に設置した。
左側の白いパネルは 周回駅部分のアナウンス制御盤。
ウ~ム、印刷に使用したシールの色が違いすぎる・・気になる・・

(写真上) 進路を制御するRaspberryPiもメイン制御盤から取り外して周回駅床板の下側に移植した。

(写真上) 右がRaspberryPi。
左がI2Cの3V-5Vのレベル変換モジュールとレイアウト台枠間にI2C回路を引きまわすために使用するLANケーブル用のモジュラージャックを配置した基盤。
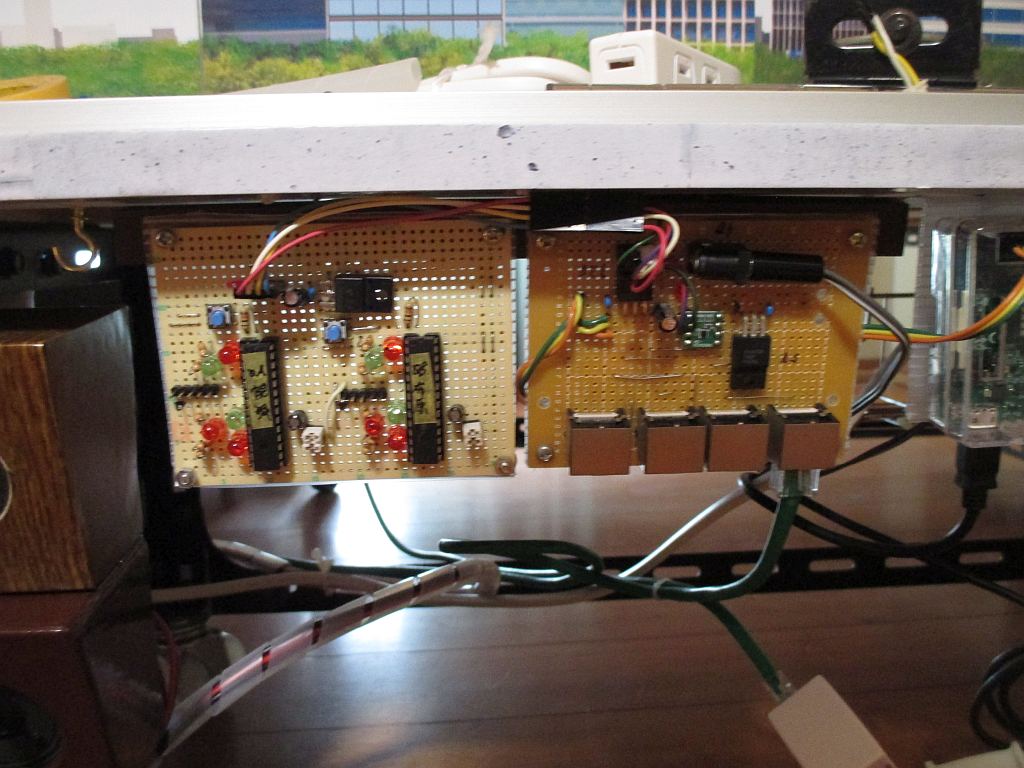
(写真上) RaspberryPiはポイント制御用のマイコンから現在の状態を受け取ったり、転換の指示を行ったりする。
ただ、これでは台枠は3分割してあるため、すべての台枠が接続されていないと進路が構成できない。
そこで、支線分の2つの台枠が未接続の場合、ダミーの値を返すためのマイコンを作ってみた。
それが左端の基盤。
ちなみに、RaspberryPiはWi-Fiで接続したクライアントからWeb版コントロールパネル等々を制御する必要がある。 ということで、ひとまずWi-Fiで接続できるようにカバー類は取り付けずむき出しにしている。

(写真上) 周回駅部分の床板側面部分にコントローラが配置されかなりゴチャゴチャしてきた。

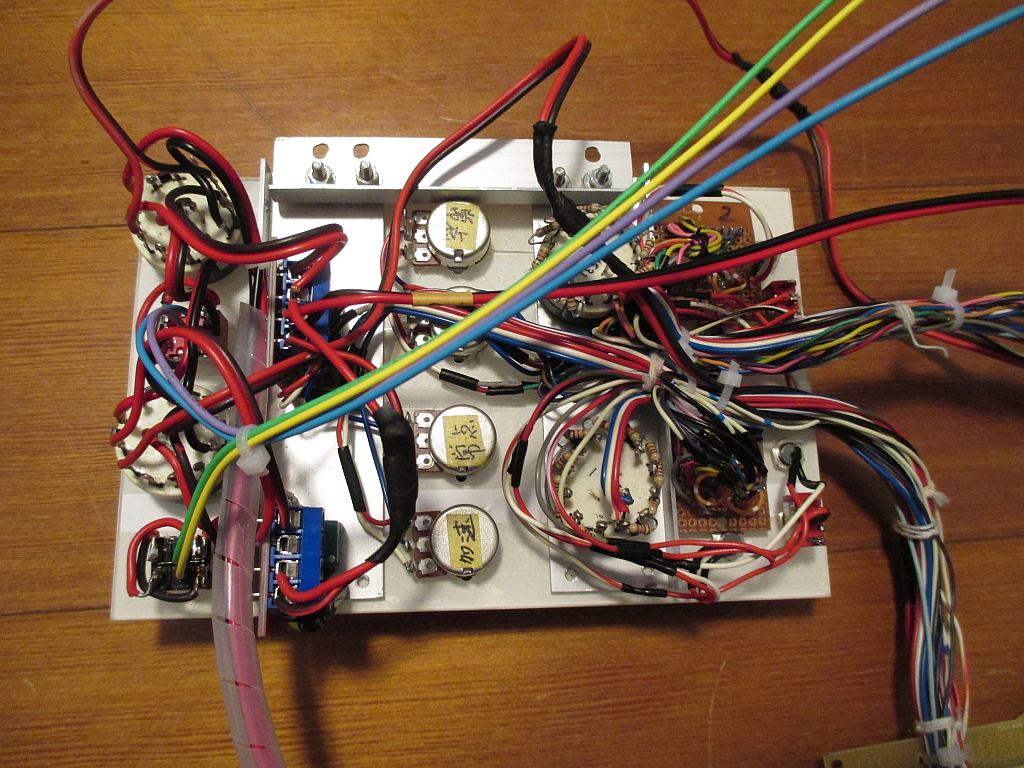
(写真上) コントローラ部が取り外され、進路制御部(ポイント制御部)のみとなったメイン制御盤。
裏面はマイコンがびっしりとあるのだがなんか貧相になってきた。
Web版コントロールパネルを作った時点でこの制御盤も不要と言えば不要になっているが・・なんとか残したい。
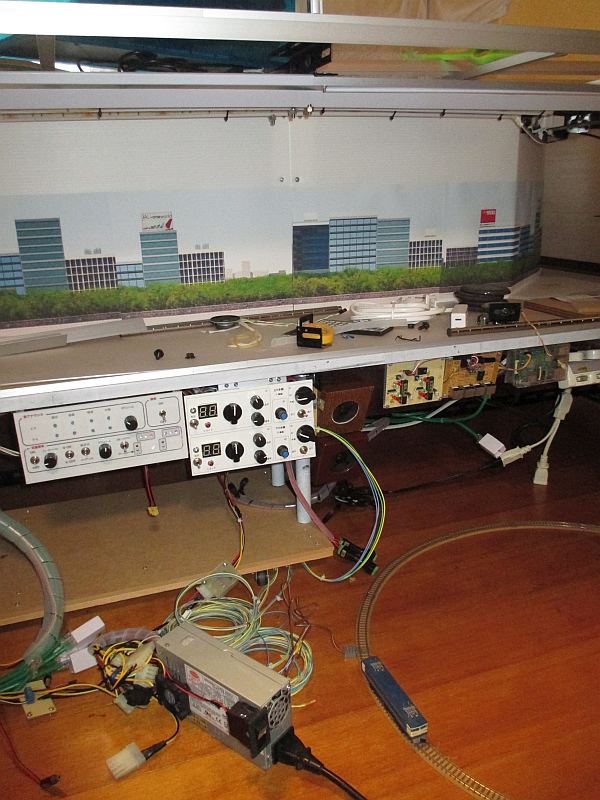
(写真上) 床にレールを敷いて試運転。
市販の安いPWMコントローラも無事動作。
ちなみに電源はメイン制御盤に内蔵していたパソコン用の250Wの電源ユニット。