Nゲージレイアウト・TOMIXポイントマシンの制御
製作中のNゲージ固定式レイアウト。マイコンでポイントの転換を制御して進路を構成する予定。フレキシブルレールを使ったポイントの転換はマイコン制御のサーボモーターで転換するが、一か所だけTOMIXポイントマシンを使用する部分がある。このポイントもマイコンで制御しなくちゃ。
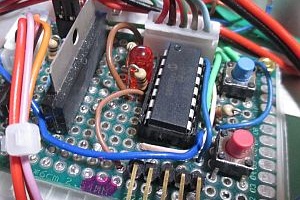
» 続きを 読むPICマイコンで制御するNゲージレイアウト用のポイントマシンの製作メモ。パチッ、パチッと切り替わるのではなく、実物のポイントマシンのようにゆっくりと切り替わるスローアクションのポイントマシンの製作記。
製作中のNゲージ固定式レイアウト。マイコンでポイントの転換を制御して進路を構成する予定。フレキシブルレールを使ったポイントの転換はマイコン制御のサーボモーターで転換するが、一か所だけTOMIXポイントマシンを使用する部分がある。このポイントもマイコンで制御しなくちゃ。
» 続きを 読む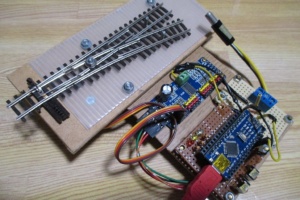
機構が複雑になったステッピングモーターを使ったスローアクションのポイントマシン。簡素なサーボモーター版に作り変えていたのだが、サーボモーターの制御ができただけで満足して作業を中断していた。やっとやる気になってなんとか完成までこぎつけた。
» 続きを 読む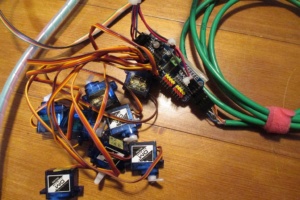
最近YouTubeでNゲージのスローアクションのポイントマシンを見ていると、ポイントを転換する部分の機構が極シンプルなものが見られるようになった。アタイのはシンプルからほど遠い。今なら引き返せるぞ・・・ウン!引き返えそう!
» 続きを 読む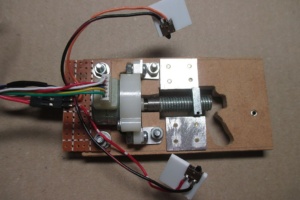
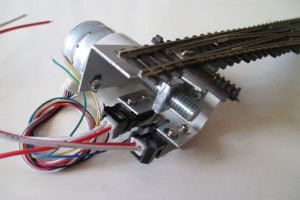
ステッピングモーターを使ったNゲージ用のスローアクションのポイントマシン。試作品よりちょっぴり省スペースにしたものを作ってみたが、停止位置の検出にマイクロスイッチを使ったので、調整が割とシビアになり、メンテナンス性は悪そう。やっぱ、元の案でいこう。
» 続きを 読む